1.2 Positioning
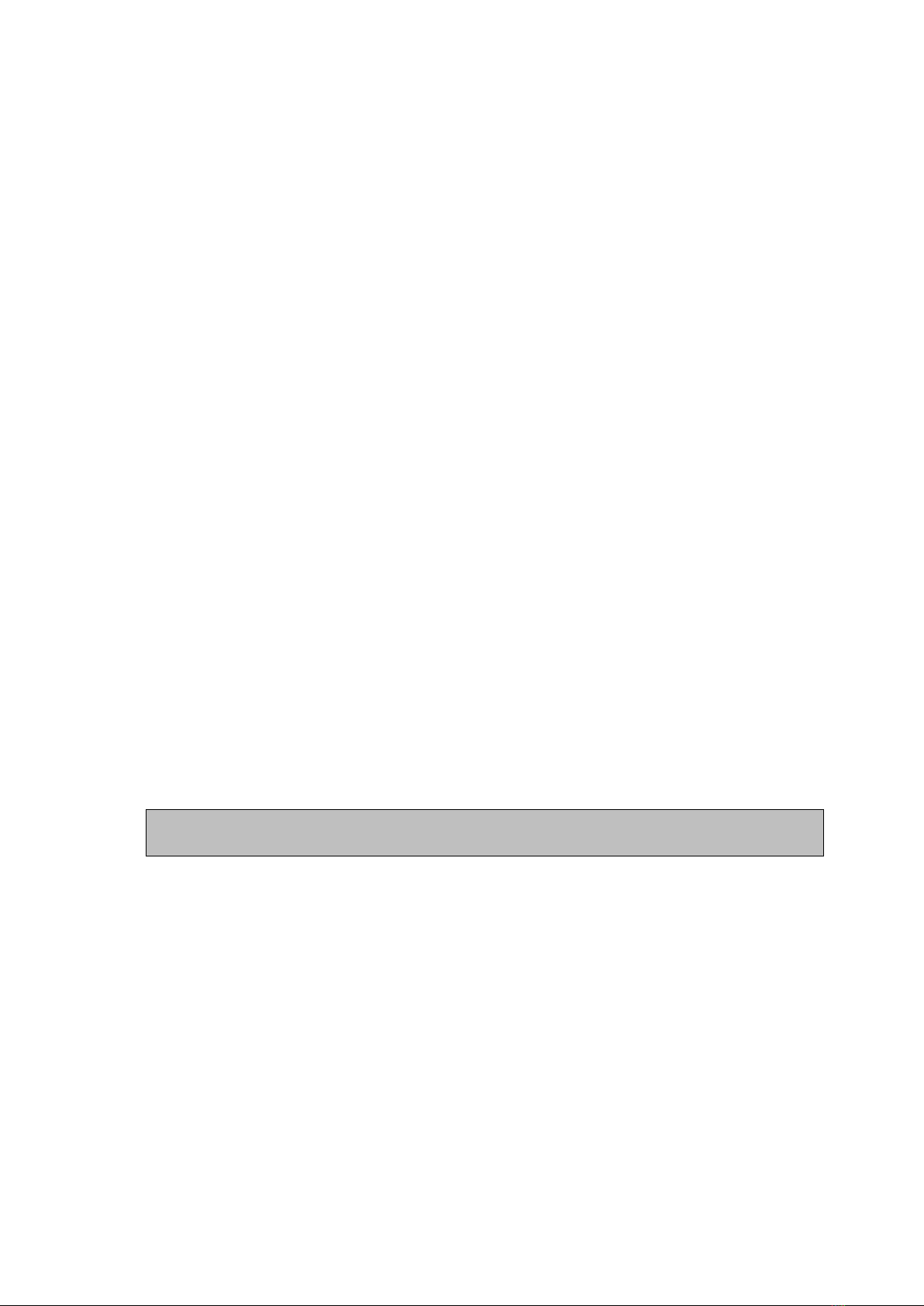
Figure 1.1: The 5o[deg] half top
angle of the F08 antenna beam.
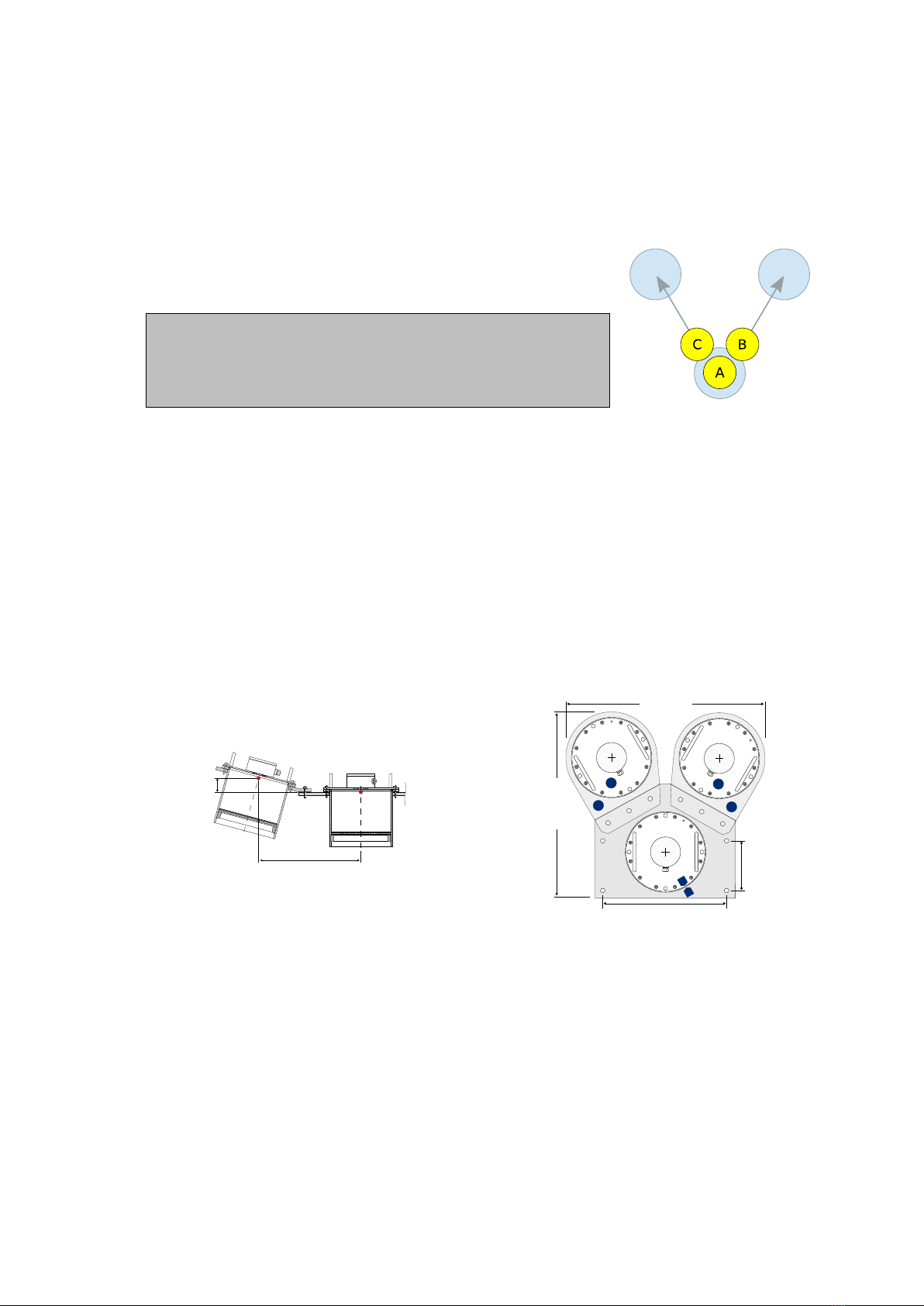
Figure 1.2: Radar dimensions
and the zero reference point.
Note that the reference point is
located at the crossing of the cen-
tral axis with the lower surface of
the mounting flange.
For obtaining the best results from each WaveGuide sensor, the
following positioning criteria must be taken into account:
• It is advised to choose a mounting position such that the
WaveGuide radar beam is free of large reflecting obstacles
(the beam of the F08 antenna can be approximated to a
conical shape having a 5◦[deg] half top angle as shown
in Fig. 1.1). The minimum horizontal distance between
a sensor and any obstacle in the beam’s path should be
at least 10% of the vertical distance between the sensor
and the obstacle. This does not only include horizontal
objects in the beam’s path but also vertical structures.
• Any structure that the WaveGuide sensors are mounted
to might have some influence on the waves progressing
around it. Hence, it is advised to mount the sensors at
a position facing the mean wave direction so that they
can measure the least disturbed water surface. As each
vessel has a unique shape, it is the user’s responsibility
to carefully identify the best position for mounting the
WaveGuide radar. In most cases the vessel’s bow provides
the optimal mounting position.
• The minimum measuring distance is at 2 meter. As such,
the sensor should be mounted with its reference point at
least 2 meter above the highest expected waterlevel during
the period in which the water surface is monitored. The
reference level for the mounting height of the radars is
shown in Fig. 1.2.
• The expected roll and pith motion of the vessel should
be taken into account when mounting the sensor. For
optimal performance, the resulting sensor attitude during
operation must not exceed 15◦[deg] of tilt from vertical. It
is good practice to align the sensor’s tilt axis with the most
stable vessel axis. For example, tilting the sensor along a
ships longitudinal axis when the expected maximum pitch
angles are lower than the maximum roll angles. At the
same time the sensor must be pointed away from the vessel
to avoid radar reflections from the vessel’s body.
4