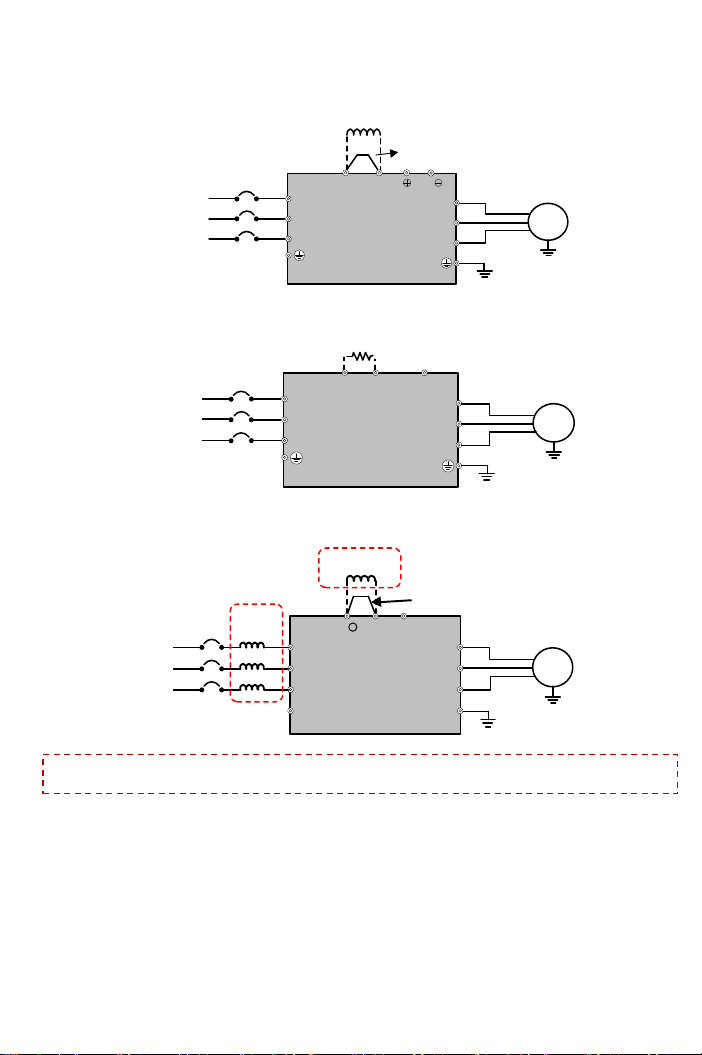
Power terminal;
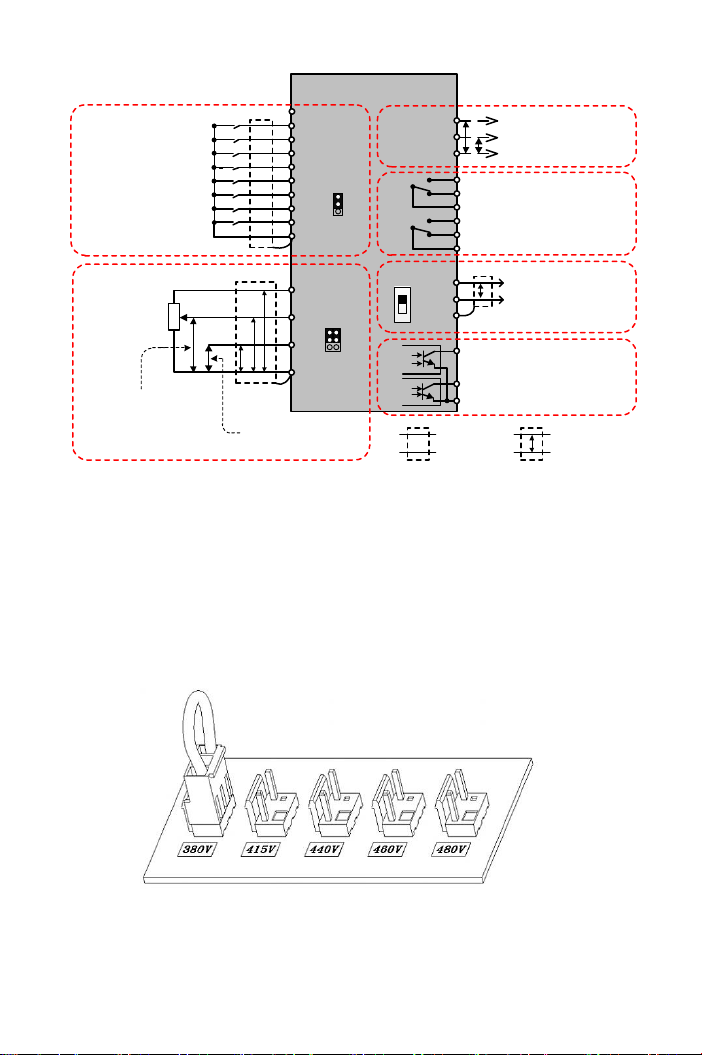
Control device usage
Output DC+24V; Maximum supplied current is 50mA.
Output DC+12V; Maximum supplied current is 20mA.
Common of analog input
control terminals
Common terminal for control power (P12/12V,P24) and
analog input terminal (Vin, Iin).
Connect the FWD and COM terminals for forward
operation. (F_001=0,1,2)
Connect the REV and COM terminals for reverse operation.
(F_001=0,1,2)
Multi-function input
terminal 1
․The function is set by F_052.
․Default setting: Multi-speed level 1 command
Multi-function input
terminal 2
․The function is set by F_053.
․Default setting: Multi-speed level 2 command
Multi-function input
terminal 3
․The function is set by F_054.
․Default setting: Jog command
Multi-function input
terminal 4
․The function is set by F_055.
․Default setting: Secondary accel/decel time command
Multi-function input
terminal 5
․The function is set by F_056.
․Default setting: External fault command (thr)
Multi-function input
terminal 6
․The function is set by F_057.
․Default setting: Reset command
Common of digital input
control terminals
Common of digital input control signal terminals. (FWD,
REV and X1 ~ X6)
․Input signal selection
JP4: I position (current signal)
JP4: V position (voltage signal)
․Input range: DC 4~20mA (2~10V) or
DC 0~20mA (0~10V)
․The function is set by F_126.
․Voltage meter with 10V full scale spec.
(meter impedance: 10kΩ above)
․Maximum output current: 1mA
Common of
analog output terminals
Common of analog output terminals.
Multi-function
output terminals
(relay type)
․N.O (contact a); The function is set by F_060 .
․Default setting: Error detection
․Capacity: AC250V, 0.5A Max, cosθ=0.3
․N.C (contact b); The function is set by F_060
․Capacity: AC250V, 0.5A Max, cosθ=0.3
Common terminal for Ta1, Tb1.
․N.O (contact a); The function is set by F_131
․Default setting: Operation detection
․Capacity: AC250V, 0.5A Max, cosθ=0.3
․N.C (contact b); The function is set by F_131
․Capacity: AC250V, 0.5A Max, cosθ=0.3
Multi-function output
terminals
(open collector type)
․The function is set by F_058, F_059.
․Capacity: DC48V, 50mAMax
Common terminal of Y1, Y2.
External
Communication
Terminal
Signal transmission
terminal(+)
․Connect the RM6 series drive by transmission cable,
when the drive is controlled by RS-485 communication
interface.
․Communication protocol: Modbus
Signal transmission
terminal(-)
Grounding terminal of
signal transmission
Grounding terminal of shielding wire.