System Overview
Congratulations on the purchase of your Pelagic Autopilot. The Pelagic is a sophisticated nine (9) axis, gyro controlled autopilot designed to deliver top
performance in a variety of conditions. Advanced features allow custom tuning for optimum performance whether cruising or on the race course.
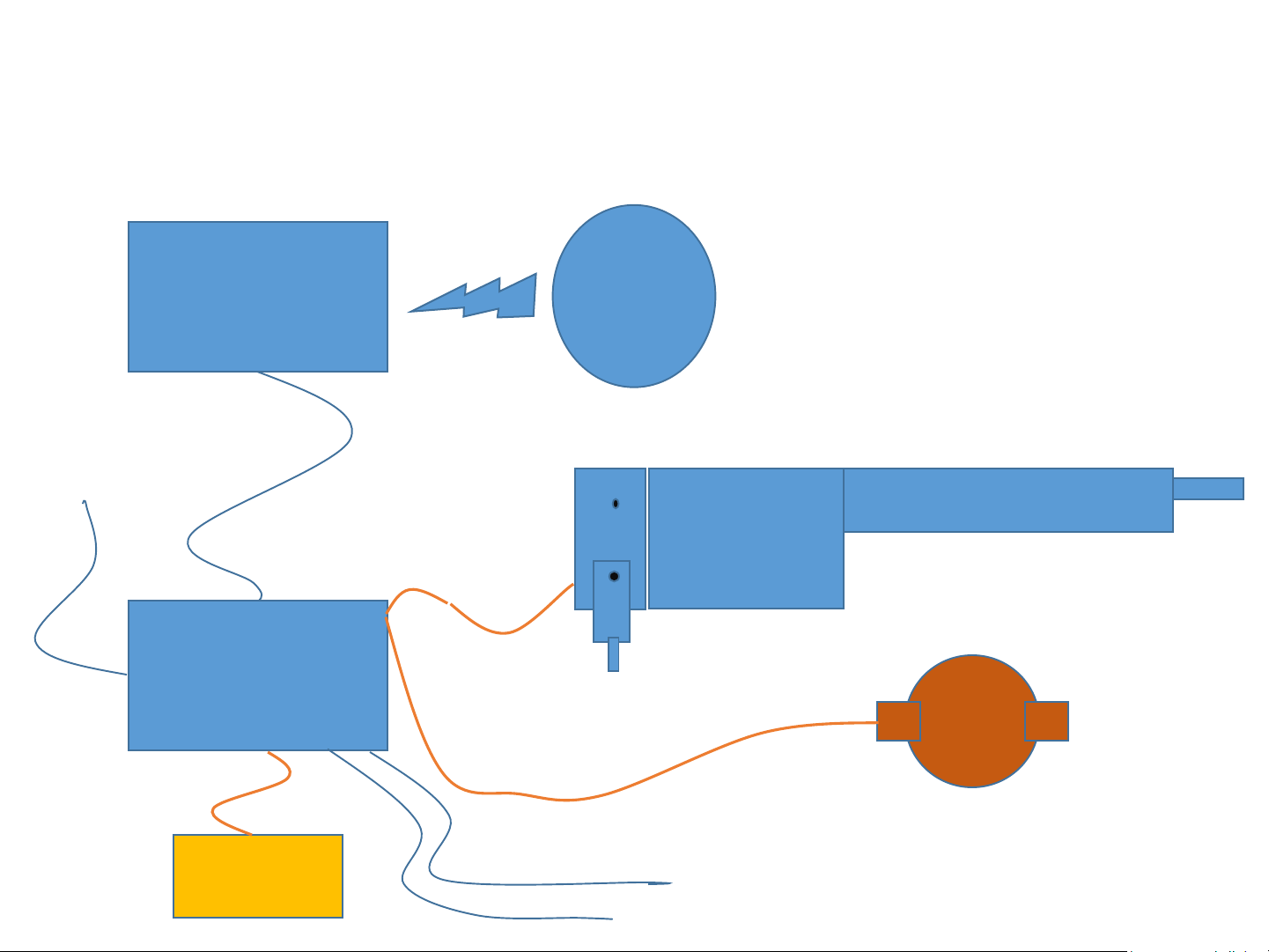
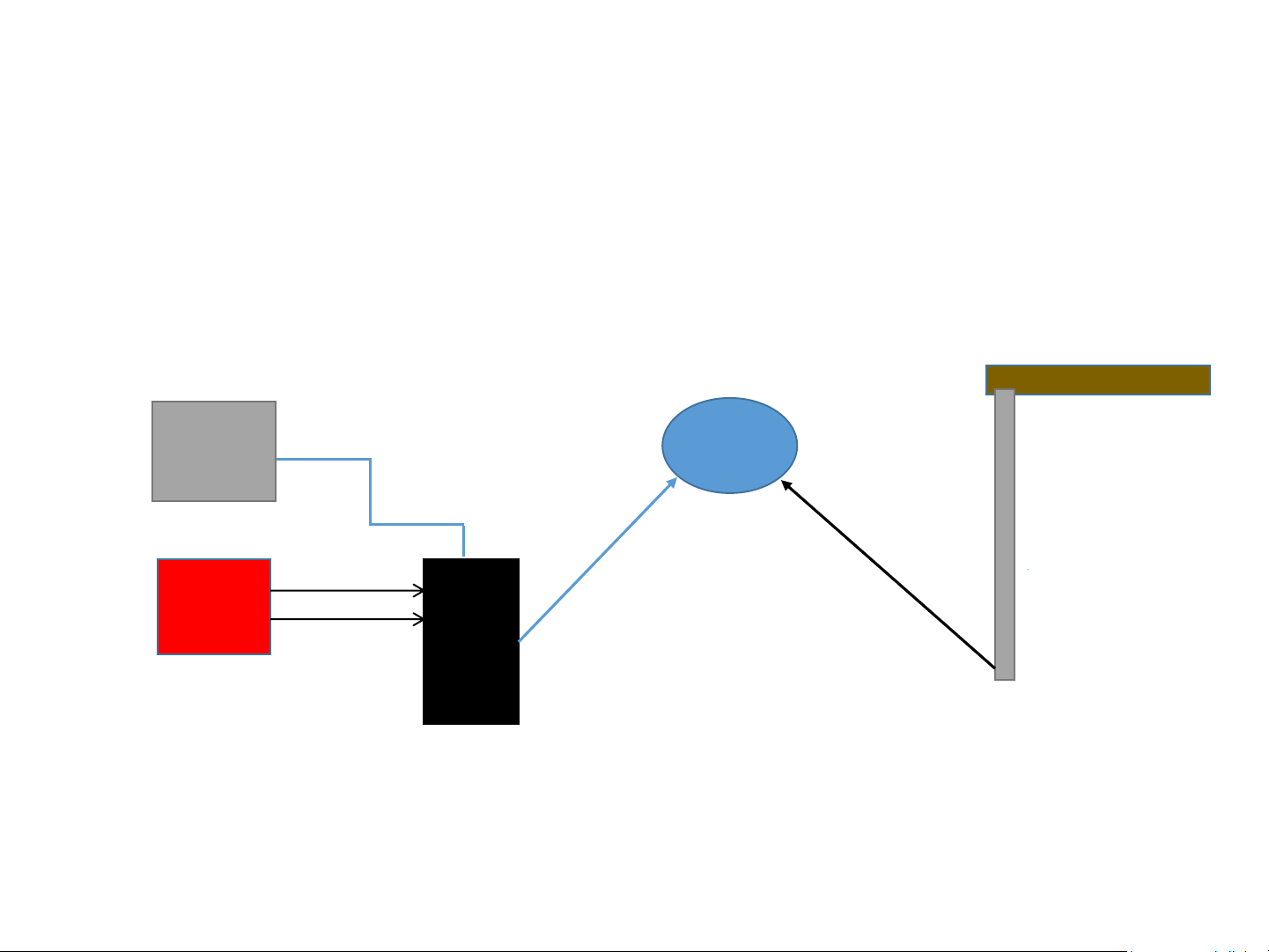
The Pelagic Autopilot is comprised of three (3) components; the Control Head, Motor Drive Box and actuator. The modular nature of the Pelagic system
allows support for many different applications including:
•Tiller steered boats (large and small)
•Use of Pelagic electronics with below decks RAMs (electrical or hydraulic)
•Use of Pelagic actuators with other manufacturer’s obsolete electronics
•Use with popular windvanes, including the Monitor and Aries.
The Control Head provides the autopilot control functions and is typically mounted in or adjacent to the cockpit. As the Control Head contains the
electronic compass and gyro sensor, it needs to be located a minimum of 6” from metal objects, including the deck compass. The unit also has an
internal USB port to receive software updates. There are two (2) important concepts that need to be understood when installing and using the Pelagic;
Orientation and Calibration.
•Orientation –This is the process of orientating the Pelagic sensors. Because the Pelagic uses a gyro sensor(s), it needs to be oriented
correctly so that as the boat pitches and rolls the feedback to the rudder is in the appropriate direction. Orientation is specified at time of
ordering and preset at the factory. While Orientation can be changed in the onboard by the user, it’s important to install the unit as
ordered or change the Orientation prior to use.
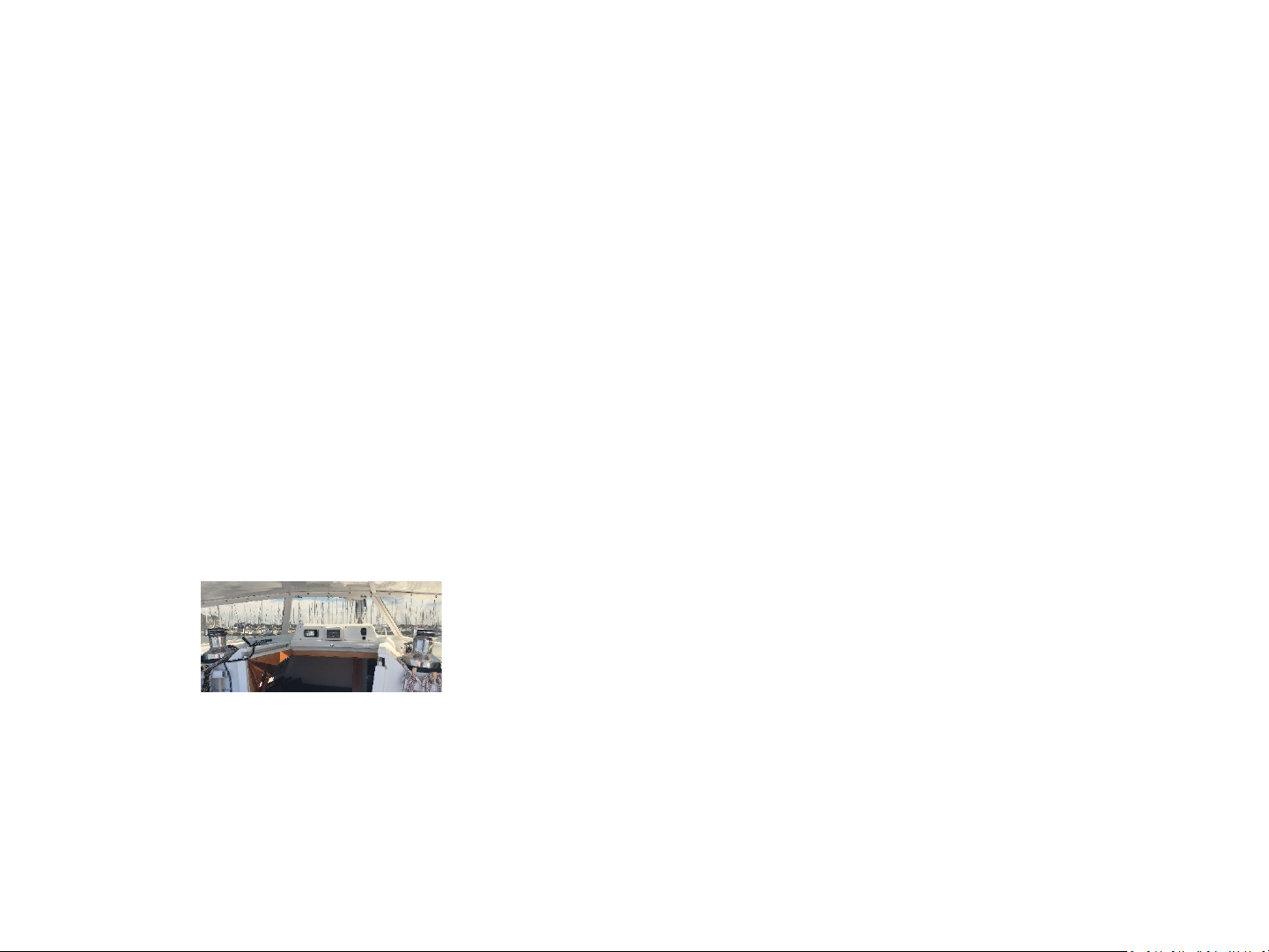
•Stern facing example –Control Head is mounted on bulkhead with control buttons facing aft (see below)
•Bow facing example –Control Head is mounted on transom with control buttons facing forward
•Port or Starboard facing are also available options
•Calibration –This is the process of calibrating the compass. Initial calibration is performed at the factory and there is no need to recalibrate
onboard unless the boat puts out strong magnetic interference.
•The Motor drive box provides power to the Pelagic system and should be installed below decks out of the elements. Two versions of the Motor
drive box are available; a standard version for the Pelagic actuators and a heavy electronics version to meet the demands of large actuators and
below decks drives.
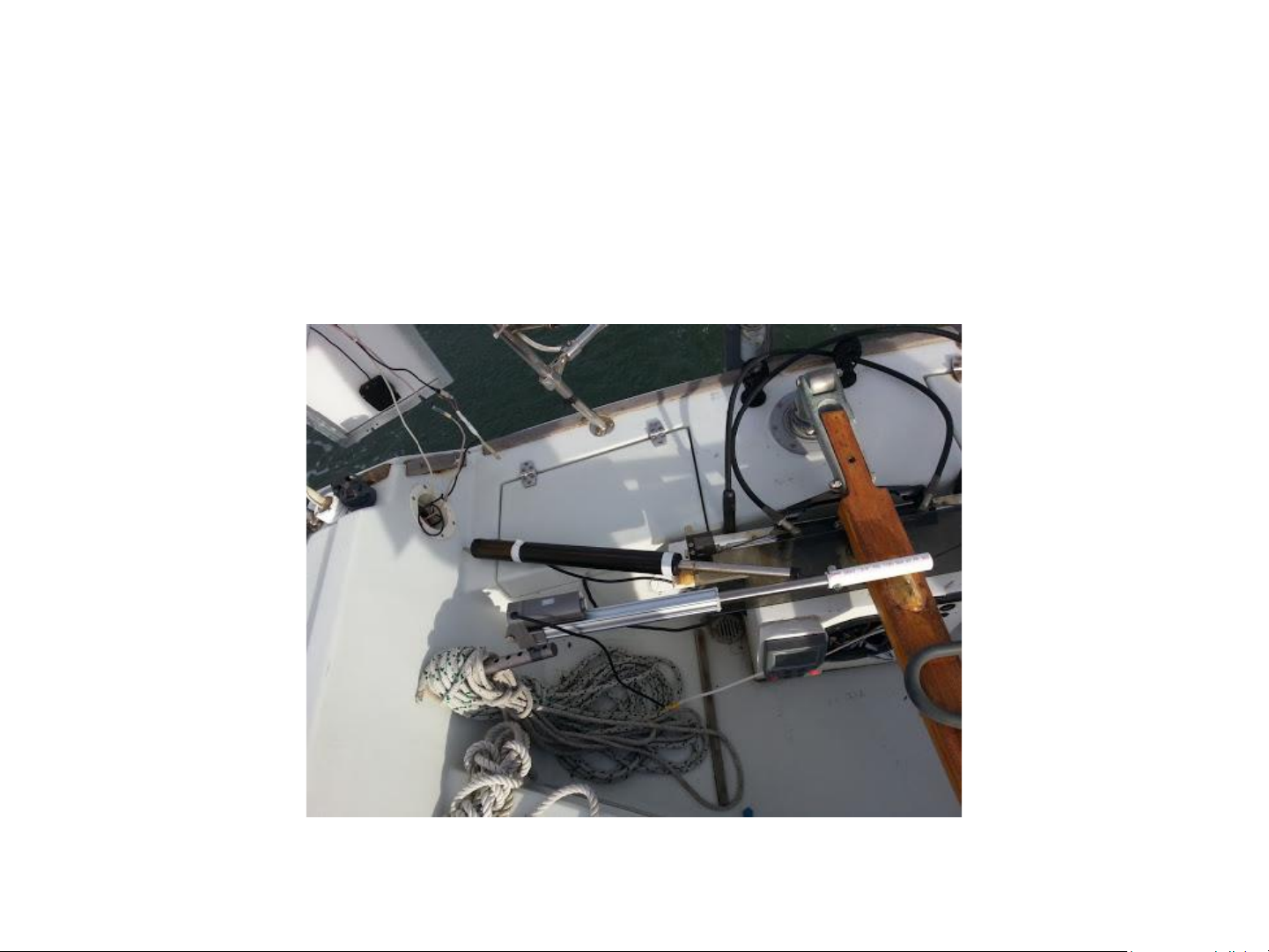
•The Pelagic actuators are designed to steer small to mid-displacement vessels, by direct attachment to the tiller or windvane. The actuators are
ruggedized to provide longer service life.
Typical Stern Facing Installation