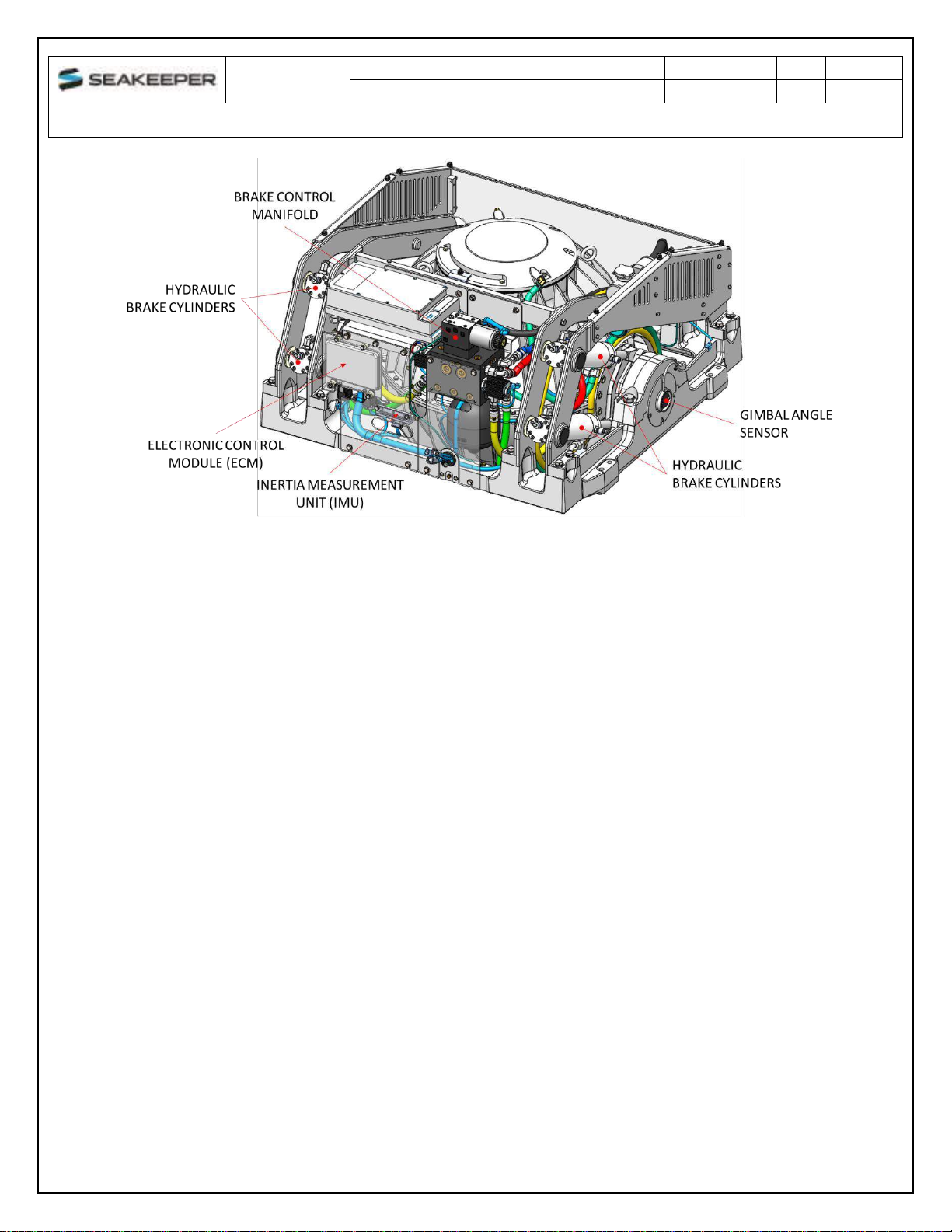
1.4 Electronic Control Module
The Electronic Control Module (ECM) monitors all the system sensors and automatically regulates
operation of the Seakeeper.
The controller commands the motor speed and regulates the Seakeeper’s precession rate and
gimbal angle. This is accomplished by commands to a high response flow control valve in the
hydraulic brake circuit that increases or decreases the brake pressure.
1.5 Inertia Measurement Unit (IMU)
The motion sensor suite in the IMU measures the angular movements of the vessel and the
vertical and lateral boat movement. These signals are communicated to the ECM through the
Seakeeper’s wiring harness.
1.6 Brake
The brake mechanism consists of four hydraulic cylinders that attach to crank arms on the
Seakeeper gimbal shafts. The Seakeeper controller modulates how fast the oil can flow through
a control valve thus controlling the precession rate of the Seakeeper.
The brake hydraulic circuit is a pre-charged closed loop system –that is, there is no pump, motor
or reservoir in the circuit. An accumulator is installed in the circuit, so the pre-charge pressure
does not increase as the fluid temperature rises due to the braking action. Locking solenoid
valves are installed in the circuit to lock the Seakeeper, so it cannot precess if there are any
alarms or a mechanical problem with the Seakeeper.