Contents
Components List ........................................................................................................................................1
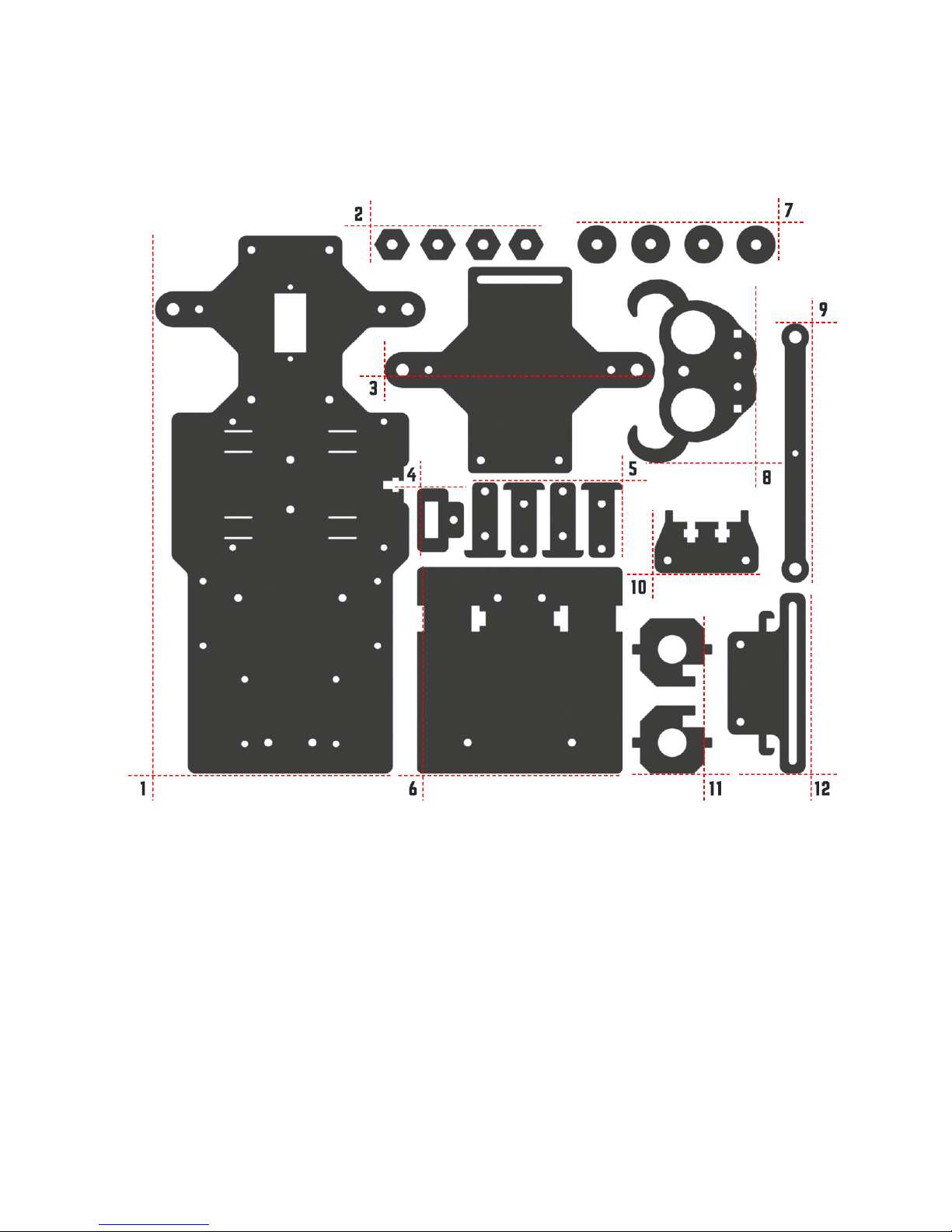
Acrylic Plates ..........................................................................................................................................1
Servo Accessories .................................................................................................................................2
Mechanical Fasteners .........................................................................................................................2
Wires .........................................................................................................................................................3
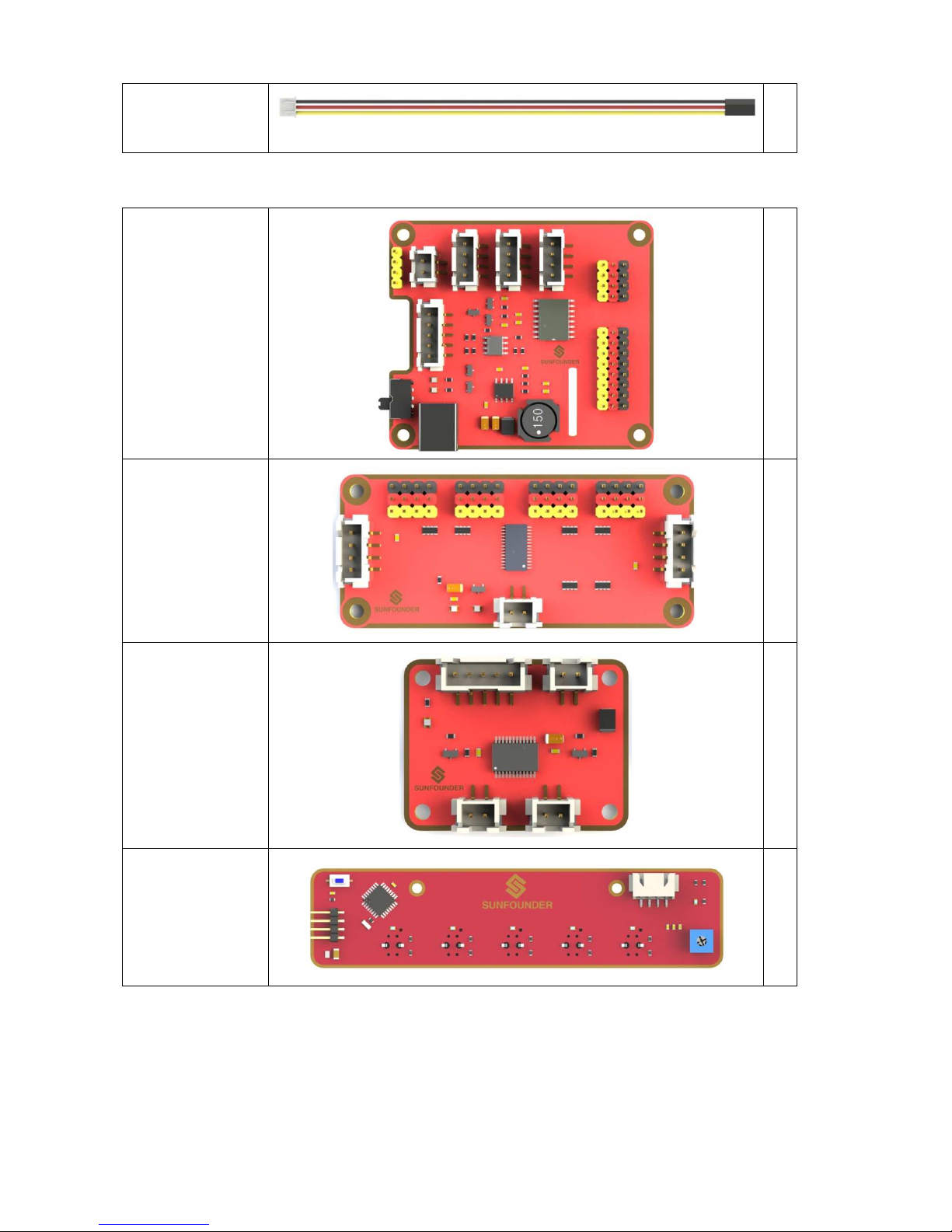
PCB ...........................................................................................................................................................4
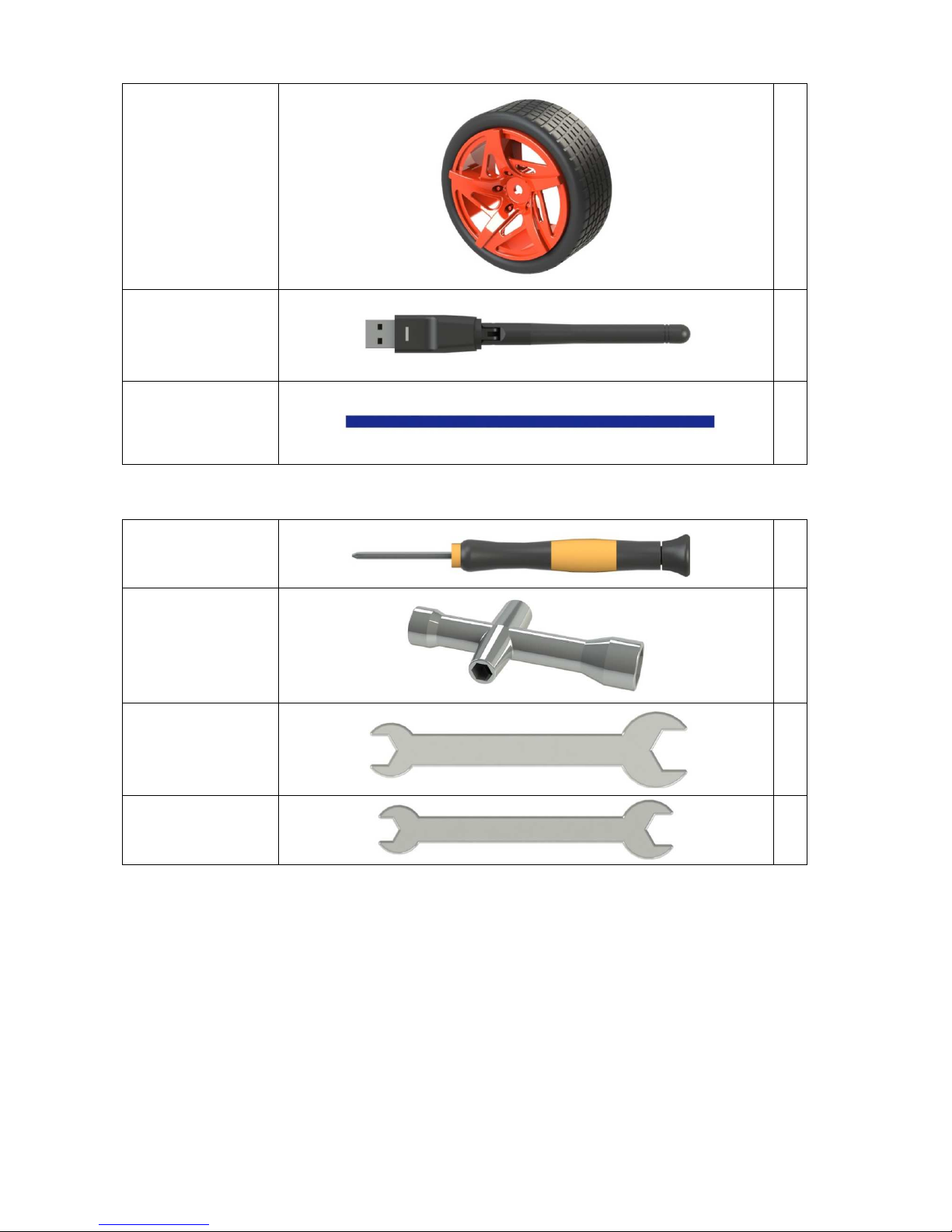
ther Components ..............................................................................................................................5
Tools ..........................................................................................................................................................6
Introduction .................................................................................................................................................7
Building the Car ..........................................................................................................................................7
Fixing Rear Wheels ................................................................................................................................7
Upper Plate ......................................................................................................................................... 10
Battery Holder ..................................................................................................................................... 11
Rear Wheels (Driving) ....................................................................................................................... 13
TF Card Guard .................................................................................................................................... 15
Front Half Chassis ............................................................................................................................... 16
Front Wheels ........................................................................................................................................ 17
Steering Part ........................................................................................................................................ 18
PCB Assembly ..................................................................................................................................... 20
Circuits Building .................................................................................................................................. 21
Software Installation .......................................................................................................................... 23
1.
Log into Raspberry Pi .............................................................................................................. 23
2.
Get Source Code .................................................................................................................... 23
3.
Go to the Code Directory ..................................................................................................... 24
4.
Install the Environment ........................................................................................................... 24
Adjust the Servo to 90 Degrees ..................................................................................................... 25
Build the Rest of the Car .................................................................................................................. 26
Configuration ...................................................................................................................................... 28
Arming the Car! ....................................................................................................................................... 32
Ultrasonic bstacle Avoidance .................................................................................................... 33
How the bstacle Avoidance Works ..................................................................................... 33
Principle ........................................................................................................................................... 33
Procedures ..................................................................................................................................... 33