Related documents
3AXD50000955862 Rev A EN 2023-05-29
Original instructions.
© Copyright 2023 ABB. All rights reserved.
ACH180 manual list Ecodesign information (EU
2019/1781)
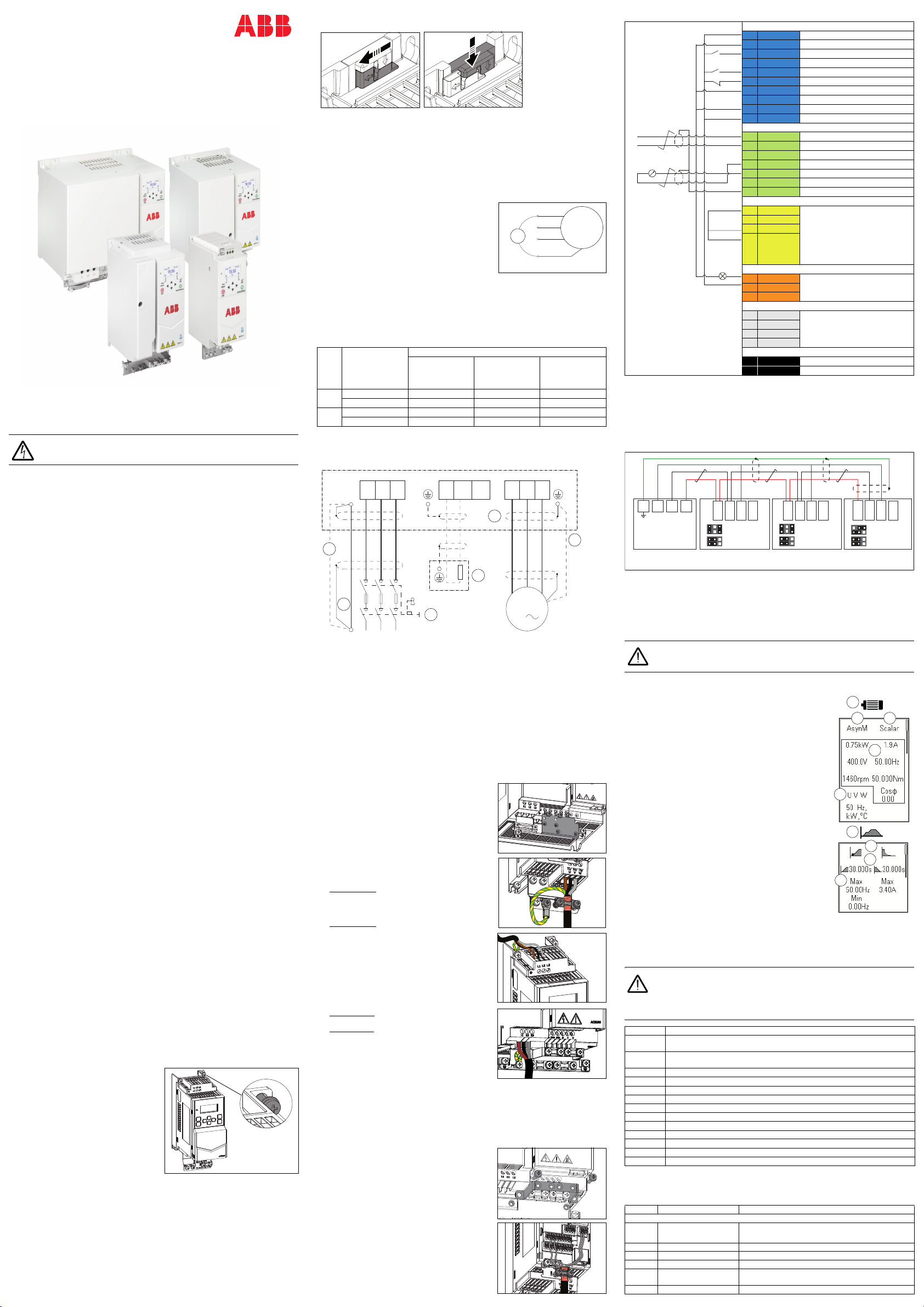
99.10 Motor nominal power depends on rating
99.11 Motor nominal cosφ0.00 … 1.00
99.12 Motor nominal torque depends on rating
99.16 Motor phase order [0]UVW, [1]UWV
Group 01 Actual values (read-only)
1.01 Motor speed used -30000.00 … 30000.00 rpm
1.06 Output frequency -500.00 … 500.00 Hz
1.07 Motor current 0.00 … 30000.00 A
1.10 Motor torque -1600.00% … 1600.00%
1.11 DC voltage 0.00 … 2000.00 V
1.13 Output voltage 0 … 2000 V
1.14 Output power -32768.00 … 32767.00 kW
Group 5 Diagnostics (read-only)
5.02 Run-time counter 0 … 65535 days
5.11 Inverter temperature -40.0 … 160.0%
Group 10 Standard DI, RO
10.24 RO1 source [2]Ready run, [7]Running, [14]Fault, [16]Fault/Warning
[54]Damper control
Group 11 Standard DI, RO
11.06 DO1 output source [0]Not energized, [2]Ready run, [7]Running, [14]Fault,
[16]Fault/Warning, [54]Damper control
11.21 DI5/AI1 configuration [0]Digital input 5, [1]Analog input 1
Group 12 Standard AI
12.15 AI1 unit selection [2]V, [10]mA
12.17 AI1 min 0.000 … 11.000 V or 0.000 … 22.000 mA, 0.000 V or
0.000 mA
12.18 AI1 max 0.000 … 11.000 V or 0.000 … 22.000 mA, 10.000 V or
20.000 mA
12.19 AI1 scaled at AI1 min -32768.000 … 32767.000, 0.000
12.20 AI1 scaled at AI1 max -32768.000 … 32767.000, 50.000
12.25 AI2 unit selection [2]V, [10]mA
12.27 AI2 min 0.000 … 11.000 V or 0.000 … 22.000 mA, 0 V or 4 mA
12.28 AI2 max 0 … 11.000 V or 0 … 22.000 mA, 10 V or 20 mA
12.29 AI2 scaled at AI2 min -32768.000 … 32767.000, 0.000
12.30 AI2 scaled at AI2 max -32768.000 … 32767.000, 50.000
Group 13 Standard AO
13.12 AO1 source [3]Output frequency, [4]Motor current
13.15 AO1 unit selection [2]V, [10]mA
13.17 AO1 source min -32768.0 … 32767.0, 0.0
13.18 AO1 source max -32768.0 … 32767.0, 50.0
13.19 AO1 out at AO1 src min 0.000 … 11.000 V or 0.000 … 22.000 mA, 0.000mA or
0.000 V
13.20 AO1 out at AO1 src max 0.000 … 11.000 V or 0.000 … 22.000 mA, 20.000 mA or
10.000 V
Group 19 Operation mode
19.11 Ext1/Ext2 selection [0]EXT1, [1]EXT2, [3]DI1, [4]DI2, [5]DI3, [6]DI4, [7]DI5
Group 20 Start/stop/direction
20.01 Ext1 commands [0]Not selected, [1]In1 Start,[2]In1 Start;In2 Dir, [3]In1
Start fwd;In2 Start rev, [4]In1P Start;In2 Stop,[5]In1P
Start;In2 Stop;In3 Dir, [6]In1P Start fwd;In2P Start
rev;In3 Stop, [11]Control panel, [14]Embedded fieldbus
20.03 Ext1 in1 source [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.04 Ext1 in2 source [0]Always off,[2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.05 Ext1 in3 source [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.06 Ext2 commands [0]Not selected, [1]In1 Start, [2]In1 Start;In2 Dir, [3]In1
Start fwd;In2 Start rev, [4]In1P Start;In2 Stop,[5]In1P
Start;In2 Stop;In3 Dir, [6]In1P Start fwd;In2P Start
rev;In3 Stop, [11]Control panel, [14]Embedded fieldbus
20.08 Ext2 in1 source [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.09 Ext2 in2 source [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.10 Ext2 in3 source [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
20.21 Direction [0]Request, [1]Forward, [2]Reverse
Group 21 Start/stop mode
21.01 Start mode [0]Fast, [1]Const time, [2]Automatic
21.02 Magnetization time 0 … 10000 ms, 500 ms
21.03 Stop mode [0]Coast, [1]Ramp, [2]Torque limit
21.19 Scalar start mode [0]Normal, [1]Const time, [2]Automatic, [3]Torque
Boost, [4]Automatic+boost [5]Flying start [6]Flying
start+boost
Group 22 Speed reference selection
22.11 Ext1 speed ref1 [1]AI1 scaled, [2]AI2 scaled, [8]EFB ref1, [9]EFB ref2,
[16]PID
22.18 Ext2 speed ref1 [0]Zero, [1]AI1 scaled, [2]AI2 scaled, [8]EFB ref1, [9]EFB
ref2, [16]PID
22.22 Constant speed sel1 [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
22.23 Constant speed sel2 [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
22.26 Constant speed 1 -30000.00 … 30000.00 rpm, 300.00 rpm
22.27 Constant speed 2 -30000.00 … 30000.00 rpm, 600.00 rpm
22.28 Constant speed 3 -30000.00 … 30000.00 rpm, 900.00 rpm
22.71 Motor potentiometer
function
[0]Disabled, [1]Enabled (init at stop/power-up),
[2]Enabled (resume always), [3]Enabled (init to actual)
[4]Enabled (resume/init to actual)
22.72 Motor potentiometer
initial value
-32768.00… 32767.00, 0.00
22.73 Motor potentiometer up
source
[0]Not used, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
22.74 Motor potentiometer
down source
[0]Not used, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
22.75 Motor potentiometer
ramp time
0.0…3600.0 s, 40.0 s
22.76 Motor potentiometer
min value
-32768.00… 32767.00, -50.00
22.77 Motor potentiometer
max value
-32768.00… 32767.00, 50.00
Group 23 Speed reference ramp
23.12 Acceleration time 1 0.000 … 1800.000 s, 20.000 s
23.13 Deceleration time 1 0.000 … 1800.000 s, 20.000 s
Group 28 Frequency reference chain
28.11 Ext1 frequency ref1 [1]AI1 scaled, [2]AI2 scaled, [8]EFB ref1, [9]EFB ref2,
[16]PID
28.15 Ext2 frequency ref1 [0]Zero, [1]AI1 scaled, [2]AI2 scaled, [8]EFB ref1, [9]EFB
ref2, [16]PID
28.22 Constant frequency sel1 [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
28.23 Constant frequency sel2 [0]Always off, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
28.26 Constant frequency 1 -500.00 … 500.00 Hz, 5.00 Hz
28.27 Constant frequency 2 -500.00 … 500.00 Hz, 10.00 Hz
28.28 Constant frequency 3 -500.00 … 500.00 Hz, 15.00 Hz
28.72 Freq acceleration time 1 0.000 … 1800.000 s, 30.000 s
28.73 Freq deceleration time 1 0.000 … 1800.000 s, 30.000 s
Group 30 Limits
30.11 Minimum speed -30000.00 … 30000.00 rpm, 0.00 rpm
30.12 Maximum speed -30000.00 … 30000.00 rpm, 1500.00 rpm
30.13 Minimum frequency -500.00 … 500.00 Hz, 0.00 Hz
30.14 Maximum frequency -500.00 … 500.00 Hz, 50.00 Hz
30.17 Maximum current depends on rating
Group 31 Fault functions
31.11 Fault reset selection [0]not used, [2]DI1, [3]DI2, [4]DI3, [5]DI4, [6]DI5
Group 40 Process PID set 1
40.07 Process PID operation
mode
[0]Off, [1]On, [2]On when drive running
40.08 Set 1 feedback 1 source [8]AI1 percent, [9]AI2 percent
40.16 Set 1 setpoint 1 source [2]Internal setpoint, [11]AI1 percent, [12]AI2 percent
40.24 Set 1 internal setpoint 0 -200000.00 … 200000.00, 0.00
40.31 Set 1 deviation inversion [0]Not inverted (Ref - Fbk), [1]Inverted (Fbk - Ref)
40.32 Set 1 gain 0.01 … 100.00, 1.00
40.33 Set 1 integration time 0.0 … 9999.0 s, 10.0 s
Group 45 Energy efficiency
45.11 Energy optimizer [0]Disable, [1]Enable
Group 58 Embedded fieldbus
58.01 Protocol enable [0]None, [1]ModbusRTU, [2]BACnet MSTP, [5]N2, [7]GP1
Par. No. Par. Name Settings/Range (default value in bold) Ratings
Fuses and typical power cable sizes
Terminal data for the power cables
Notes:
•The minimum specified wire size does not necessarily have sufficient current carrying
capacity at maximum load.
•The terminals do not accept a conductor that is one size larger than the maximum
specified wire size.
•The maximum number of conductors per terminal is 1.
Free space requirements
Dimensions and weights
Type
ACH18
0-04x-
...
Input
current Output ratings
No
chok
e
With
chok
e
Max.
curre
nt
Nominal use Light-duty use Heavy-duty use
I
1
I
1
I
max
I
n
P
n
I
Ld
P
Ld
I
Hd
P
Hd
AAAAkWhpAkWhp AkWhp
1-phase
U
n= 200 … 240 V
06A9-1 12.6 9.2 8.1 6.9 1.1 1.5 6.6 1.1 1.5 4.5 0.75 1.0
07A8-1 17.3 12.0 11.9 7.8 1.5 2.0 7.5 1.5 2.0 6.6 1.1 1.5
09A8-1 21.8 17.0 13.5 9.8 2.2 3.0 9.8 2.2 3.0 7.5 1.5 2.0
12A2-1 23.9 21.1 17.6 12.2 3.0 3.0 11.6 3.0 3.0 9.8 2.2 3.0
3-phase
U
n= 200 … 240 V
06A9-2 7.1 6.9 8.1 6.9 1.1 1.5 6.6 1.1 1.5 4.5 0.75 1.0
07A8-2 8.9 7.8 11.9 7.8 1.5 2.0 7.5 1.5 2.0 6.6 1.1 1.5
09A8-2 12.1 9.8 13.3 9.8 2.2 2.0+ 9.3 2.2 2.0+ 7.5 1.5 2.0
15A6-2 19.1 15.6 19.3 15.6 3.0 3.0 14.6 3.0 4.0 10.7 2.2 3.0
17A5-2 21.2 17.5 26.3 17.5 4.0 4.0 16.7 4.0 5.0 12.2 3.0 4.0
25A0-2 27.2 25.0 31.5 25.0 5.5 7.5 24.2 5.5 7.5 17.5 4.0 5.0
033A-2 35.0 32.0 45.0 32.0 7.5 10.0 30.8 7.5 10.0 25.0 5.5 7.5
048A-2 48.0 48.0 57.6 48.0 11.0 15.0 46.2 11.0 15.0 32.0 7.5 10.0
3-phase
U
n= 380 … 415 V
04A0-4 6.3 3.3 5.9 4.0 1.5 - 3.8 1.5 - 3.3 1.1 -
05A6-4 9.1 4.6 7.2 5.6 2.2 - 5.3 2.2 - 4.0 1.5 -
07A2-4 12.0 5.9 10.1 7.2 3.0 - 6.8 3.0 - 5.6 2.2 -
09A4-4 13.0 7.9 13.0 9.4 4.0 - 8.9 4.0 - 7.2 3.0 -
12A6-4 17.4 12.6 16.9 12.6 5.5 - 12.0 5.5 - 9.4 4.0 -
17A0-4 25.2 17.0 22.7 17.0 7.5 - 16.2 7.5 - 12.6 5.5 -
25A0-4 31.8 25.0 30.6 25.0 11.0 - 23.8 11.0 - 17.0 7.5 -
033A-4 40.9 32.0 45.0 32.0 15.0 - 30.5 15.0 - 25.0 11.0 -
038A-4 49.0 38.0 57.6 38.0 18.5 - 36.0 18.5 - 32.0 15.0 -
045A-4 55.7 45.0 68.4 45.0 22.0 - 42.0 22.0 - 38.0 18.5 -
050A-4 55.7 50.0 81.0 50.0 22.0 - 48.0 22.0 - 45.0 22.0 -
3-phase
U
n= 440 … 480 V
04A0-4 4.6 2.8 5.9 3.5 - 2.0 3.5 - 2.0 3.0 - 1.5
05A6-4 6.9 3.8 7.2 4.8 - 3.0 4.8 - 3.0 3.5 - 2.0
07A2-4 9.2 5.0 10.1 6.0 - 3.0 6.0 - 3.0 4.8 - 3.0
09A4-4 10.3 6.7 13.0 7.6 - 5.0 7.6 - 5.0 6.3 - 3.0
12A6-4 14.8 11.0 16.9 11.0 - 7.5 11.0 - 7.5 7.6 - 5.0
17A0-4 20.3 14.0 22.7 14.0 - 10.0 14.0 - 10.0 11.0 - 7.5
25A0-4 26.6 21.0 30.6 21.0 - 15.0 21.0 - 15.0 14.0 - 10.0
033A-4 33.9 27.0 45.0 27.0 - 20.0 27.0 - 20.0 21.0 - 15.0
038A-4 41.3 34.0 57.6 34.0 - 25.0 34.0 - 25.0 27.0 - 20.0
045A-4 46.9 40.0 68.4 40.0 - 30.0 40.0 - 30.0 34.0 - 25.0
050A-4 46.9 42.0 81.0 42.0 - 30.0 42.0 - 30.0 42.0 - 30.0
I
1
Input current for 230 V and 400 V with motor power P
N
(kW), and for 480 V with motor
power P
Ld
(hp).
I
max
Maximum output current. Available for 2 seconds every 10 minutes when the output
frequency is less than 9 Hz.
I
n
Nominal output current. Maximum continuous rms output current (no overload).
I
Ld
Continuous rms output current. Allows 10% overload for 1 minute every 10 minutes.
I
Hd
Continuous rms output current. Allows 50% overload for 1 minute every 10 minutes.
P
n
Typical motor power in nominal use (no overload)
P
Ld
Typical motor power in light-duty use (10% overload)
P
Hd
Typical motor power heavy-duty use (50% overload)
The kilowatt ratings are applicable to most IEC 4-pole motors. The horsepower ratings
are applicable to most NEMA 4-pole motors.
Type
ACH18
0-04x-
...
Fuses Cable conductor
sizes (Cu)
Frame
size
gG gR UL class T 1 ) 2) 3 ) 4)
1) The recommended branch protection fuses must be used to maintain the IEC/EN/
UL 61800-5-1 listing.
2) The drive is suitable for use on a circuit capable of delivering not more than 100000
symmetrical amperes (rms) at 480 V (480 V drives) or 240 V (240 V drives) maximum when
protected by the fuses given in this table.
3) As an alternative to Class T fuses, you can use Class J or Class CF fuses of the same voltage
and current rating for branch circuit protection of 3-phase drives.
4) Refer to Alternate Fuses, MMPs and Circuit Breakers for ABB Drives (3AXD50000645015
[English]) for additional UL fuses and circuit breakers that can be used as branch circuit
protection.
Bussmann type Bussmann
type
Bussmann/
Edison type mm2AWG
1-phase
U
n= 200 … 240 V
06A9-1 C10G20 FWP-50G14F JJS-70 3×1.5 + 1.5 16 R1
07A8-1 C10G25 FWP-50G14F JJN-25 3×2.5 + 2.5 14 R1
09A8-1 C14G40 FWP-50G14F JJN-35 3×2.5 + 2.5 14 R1
12A2-1 C14G40 FWP-63G22F JJN-35 3×2.5 + 2.5 14 R2
3-phase
U
n= 200 … 240 V
06A9-2 C10G16 FWP-50G14F JJN-15 3×1.5 + 1.5 16 R1
07A8-2 C10G20 FWP-50G14F JJN-20 3×2.5 + 2.5 14 R1
09A8-2 C10G25 FWP-50G14F JJN-20 3×2.5 + 2.5 14 R1
15A6-2 C10G32 FWP-50G14F JJN-30 3×6 + 6 10 R2
17A5-2 C10G32 FWP-50G14F JJN-35 3×6 + 6 10 R2
25A0-2 OFAF000H50 FWP-80G22F JJN-40 3×6 + 6 10 R3
033A-2 OFAF000H63 FWP-100G22F JJN-50 3×10 + 10 8 R3
048A-2 OFAF000H100 FWP-150A JJN-100 3×25 + 16 4 R4
3-phase
U
n= 400 V (range 380 … 415 V) or 460 V (range 440 … 480 V)
04A0-4 C10G10 FWP-25G14F JJS-10 3×1.5 + 1.5 16 R1
05A6-4 C10G16 FWP-25G14F JJS-20 3×1.5 + 1.5 16 R1
07A2-4 C10G20 FWP-32G14F JJS-20 3×2.5 + 2.5 14 R1
09A4-4 C10G25 FWP-32G14F JJS-25 3×2.5 + 2.5 14 R1
12A6-4 C14G32 FWP-50G14F JJS-30 3×2.5 + 2.5 14 R2
17A0-4 C14G40 FWP-50G14F JJS-35 3×6 + 6 10 R2
25A0-4 OFAF000H50 FWP-80G22F JJS-40 3×6 + 6 10 R3
033A-4 OFAF000H63 FWP-100G22F JJS-60 3×10 + 10 8 R3
038A-4 OFAF000H80 FWP-125A JJS-70 3×10 + 10 8 R4
045A-4 OFAF000H100 FWP-150A JJS-70 3×16 + 16 6 R4
050A-4 OFAF000H100 FWP-150A JJS-70 3×25 + 16 4 R4
Frame size L1, L2, L3, T1/U, T2/V, T3/W, R-, R+/UDC+, UDC- PE
Min. wire size
(solid/
stranded)
Max. wire size
(solid/
stranded)
Tightening
torque
Max. wire size
(solid/
stranded)
Tightening
torque
mm2AWG mm2AWG N·m lbf·in mm2AWG N·m lbf·in
R1...R2 0.2/0.2 18 6/6 10 0.5…0.6 5 6/4 10 1.2 10.6
R3 0.5/0.5 18 10/6 8/10 1.2…1.5 11…13 16/16 6 1.2 10.6
R4 0.5/0.5 18 25/16 4/6 2.5…3.7 22…32 16/16 6 1.2 10.6
Above Below Sides Front
mm in mm in mm in mm in
75 2.95 75 2.95 0 0 0 0
Frame
size
Dimensions Weights
H1 H2 H3 W D M1 M2
mm in mm in mm in mm in mm in mm in mm in kg lb
R1
190 7.48 220 8.66 152 5.98 70 2.76 143 5.63 60 2.36 180 7.09 1.24 2.73
R2
202 7.95 230 9.06 165 6.48 120 4.72 143 5.63 106 4.17 191 7.52 1.92 4.23
R3
205 8.07 241 9.49 165 6.48 170 6.69 174 6.85 148 5.83 191 7.52 3.30 7.28
R4
205 8.07 240 9.45 165 6.48 260 10.24 179 7.03 234 9.21 191 7.52 5.30 11.69
Ambient conditions
Markings
The applicable markings are shown on the type label of the product.
Safe torque off (STO)
The drive has a Safe torque off function (STO) in accordance with IEC/EN 61800-5-2. It can be
used, for example, as the final actuator device of safety circuits that stop the drive in case of
danger (such as an emergency stop circuit).
When activated, the STO function disables the control voltage of the power semiconductors
of the drive output stage, thus preventing the drive from generating the torque required to
rotate the motor. The control program generates an indication as defined by parameter 31.22.
If the motor is running when Safe torque off is activated, it coasts to a stop. Closing the
activation switch deactivates the STO. Any faults generated must be reset before restarting.
The STO function has a redundant architecture, that is, both channels must be used in the
safety function implementation. The safety data given is calculated for redundant use, and
does not apply if both channels are not used.
WARNING! The STO function does not disconnect the voltage from the main and
auxiliary circuits of the drive.
Notes:
•If stopping by coasting is not acceptable, stop the drive and machinery using the
appropriate stop mode before activating the STO.
•The STO function overrides all other functions of the drive.
Wiring
The safety contacts must open/close within 200 ms of each other.
Double-shielded twisted-pair cable is recommended for the connection. The maximum length
of the cabling between the switch and the drive control unit is 300 m (1000 ft). Ground the
shield of the cable at the control unit only.
Validation
To ensure the safe operation of a safety function, a validation test is required. The test must
be carried out by a competent person with adequate expertise and knowledge of the safety
function. The test procedures and report must be documented and signed by this person.
Validation instructions of the STO function can be found in the drive hardware manual.
Technical data
•Minimum voltage at S1 and S2 to be interpreted as “1”: 13 V DC
•STO reaction time (shortest detectable break): 1 ms
•STO response time: 5 ms (typical), 10 ms (maximum)
•Fault detection time: Channels in different states for longer than 200 ms
•Fault reaction time: Fault detection time + 10 ms
•STO fault indication (parameter 31.22) delay: < 500 ms
•STO warning indication (parameter 31.22) delay: < 1000 ms
•Safety integrity level (EN 62061): SIL 3
•Performance level (EN ISO 13849-1): PL e
The drive STO is a type A safety component as defined in IEC 61508-2.
For the full safety data, exact failure rates and failure modes of the STO function, refer to the
drive hardware manual.
Declaration of conformity
Requirement During operation (installed for stationary use)
Installation site
altitude
0 … 2000 m (0 … 6562 ft)
Derating:
The output current must be derated 1% for each 100 m (330 ft)
above 1000 m (3281 ft).
Surrounding air
temperature
-10 … +60 °C (14 … 140 °F). No frost permitted.
See derating in hardware manual
(3AXD50000955862 [English]).
Relative humidity <95% (IEC 60068-2-78) without condensation
Contamination levels No conductive dust permitted.
Shock or free fall Not permitted
CE UL RCM UKCA EIP BTL WEEE TÜV Nord