20 Gear Drive, Plymouth Ind. Park, Terryville, CT 06786
Tel: (860) 585-1254 Fax: (860) 584-1973 http://www.amci.com 3
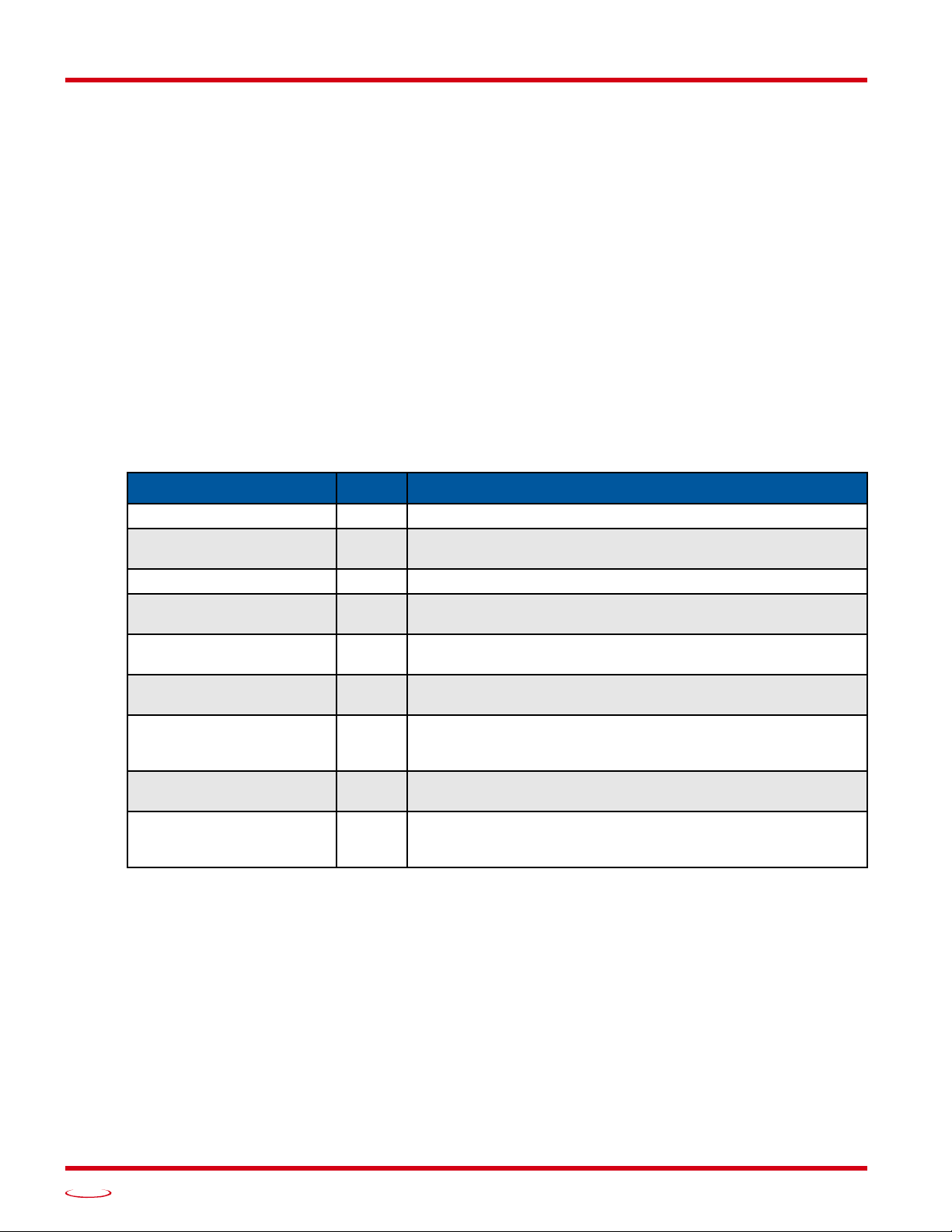
TABLE OF CONTENTS
GENERAL INFORMATION
Important User Information ..................... 2
Standard Warranty ................................... 2
Returns Policy .......................................... 2
24 Hour Technical Support Number ........ 2
WEEE Statement ..................................... 2
About this Manual
Audience .................................................. 7
Applicable Units ...................................... 7
Navigating this Manual ............................ 7
Manual Conventions ................................ 7
Trademark Notices ................................... 7
Revision Record ....................................... 8
Revision History ............................ 8
Manual Layout ......................................... 8
Reference: SMD34K Specifications
The SMD34K Family .............................. 9
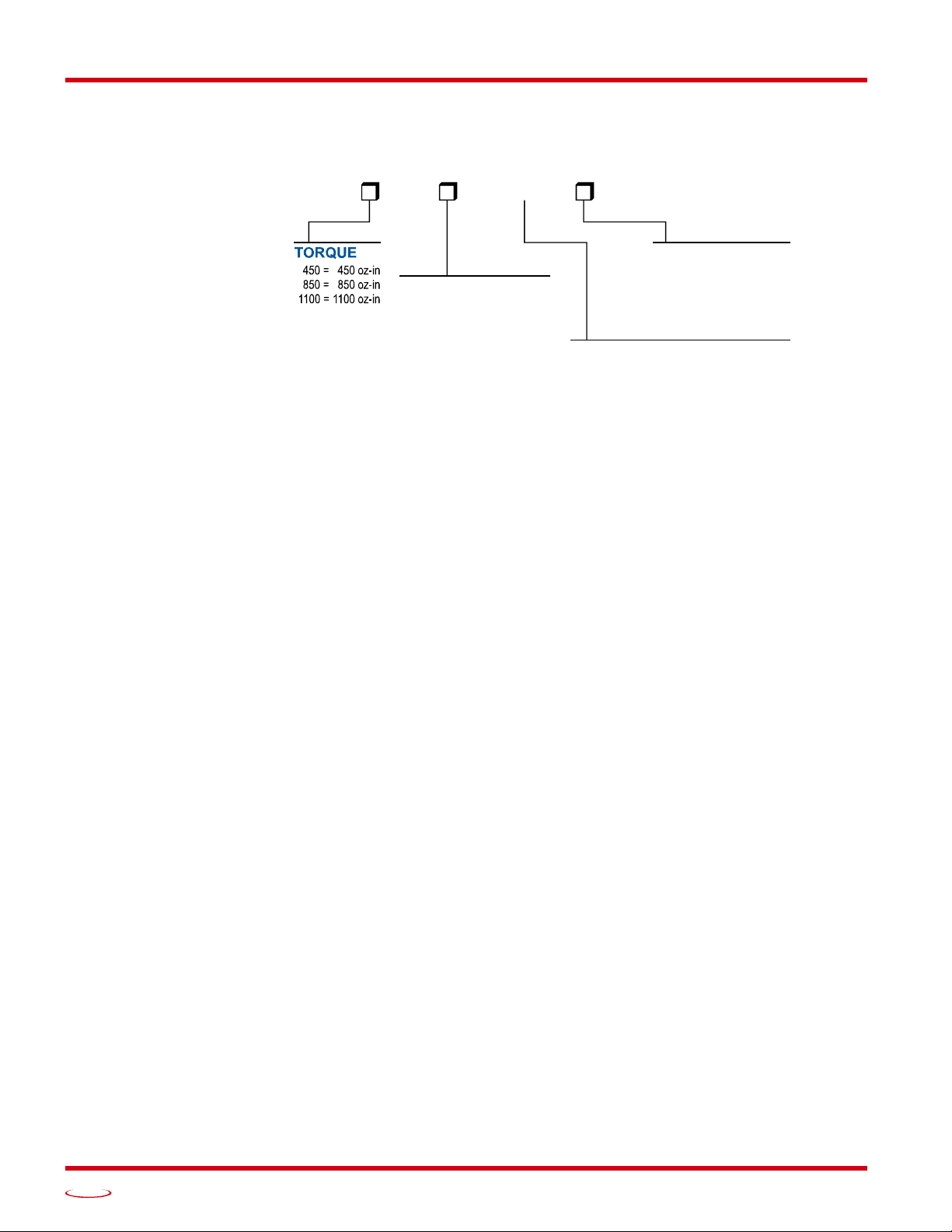
Part Numbering System ................. 10
General Functionality .................... 10
Input 3 and Distributed
Clock Functionality .......... 11
Encoder Functionality ................... 11
Specifications ........................................... 12
Conformance Markings ........................... 13
CE .................................................. 13
RoHS ............................................. 13
Indexer Functionality ............................... 13
Indexer Functionality (continued) ........... 14
Immediate Stops ............................ 14
Synchronizing Moves .................... 14
Additional Notes on
Stall Detection ............................. 14
Driver Functionality ................................. 15
Idle Current Reduction .................. 15
Available Discrete Inputs ......................... 16
Home Input .................................... 16
CW Limit Switch or
CCW Limit Switch ...................... 16
Start Indexer Move Input ............... 16
Emergency Stop Input ................... 16
Stop Jog or Registration
Move Input .................................. 17
Capture Encoder Position Input ..... 17
General Purpose Input ................... 17
Reference: SMD34K Specifications
(continued)
Optional Encoder ..................................... 17
Incremental Encoder ..................... 17
Absolute Multi-turn Encoder ........ 17
Status LED’s ............................................ 18
Run LED ....................................... 18
Error LED ..................................... 18
SMD34K Connectors ............................... 19
Ethernet Connectors ...................... 19
Digital Inputs Connector ............... 19
Power Connector ........................... 20
Torque and Power Curves ........................ 21
Power Supply Sizing ................................ 22
Regeneration Effects ..................... 23
Compatible Connectors and Cordsets ...... 24
Ethernet Connector ....................... 24
Digital Input Connector ................ 24
Power Connector ........................... 24
Ethernet Cordset ........................... 24
Digital Input Cordset .................... 24
Power Cordset ............................... 24
Reference: Motion Control
Definitions ................................................ 25
Units of Measure ........................... 25
Motor Position .............................. 25
Home Position ............................... 25
Count Direction ............................. 25
Starting Speed ............................... 25
Target Position .............................. 26
Relative Coordinates .......... 26
Absolute Coordinates ......... 26
Definition of Acceleration Types ............. 26
Linear Acceleration ....................... 26
Triangular S-Curve Accel. ............ 27
Trapezoidal S-Curve Accel. .......... 27
A Simple Move ........................................ 28
Controlled and Immediate Stops .............. 29
Host Control .................................. 29
Hardware Control ......................... 29
Basic Move Types .................................... 30
Relative Move ............................... 30
Controlled Stops ................. 30
Immediate Stops ................. 30
Absolute Move .............................. 31
Controlled Stops ................. 31
Immediate Stops ................. 31