5
Version 07.2017 www.dunkermotoren.com BG 45 EC
1.2 Motorbaureihe BG 45 EC
• Bürstenloser DC-Servomotor mit integriertem
Motioncontroller, integriertem Rotorlagegeber und
EtherCAT Schnittstelle.
• Diesen Antrieb zeichnet eine hohe Dynamik, die
kompakte Bauweise, der große Regelbereich,
Aufbau aus.
•
Dadurch werden eine hohe Positioniergenauigkeit
und sehr gute Regeleigenschaften erreicht.
• Wesentliche Parameter einer Trajektorie wie
Positions-, Geschwindigkeits- und Beschleuni-
gungswerte können über die EtherCAT-
•
mechanischen Verschleißteile und eignet sich
deshalb hervorragend auch für Dauerbetrieb.
• Die Motoren BG 45 EC können auf Wunsch auch
mit Planeten-, oder Schneckengetrieben mit einer
kombiniert werden.
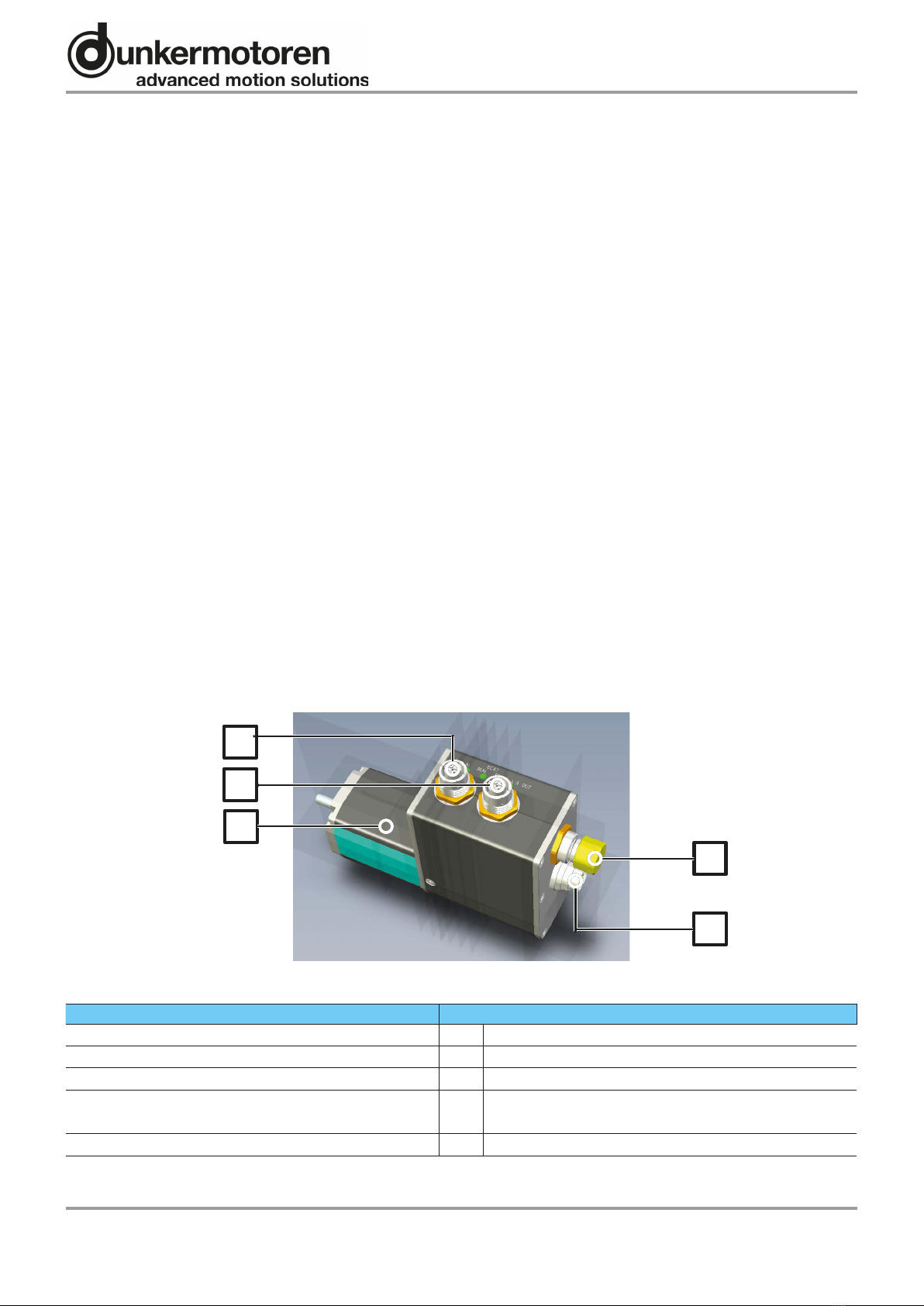
Description Pos. Bezeichnung
EtherCAT in, Round plug M12, 4-pin (D-coded) AEtherCAT in, Rundstecker M12, 4-polig (D-codiert)
EtherCAT out, Round plug M12, 4-pin (D-coded) BEtherCAT out, Rundstecker M12, 4-polig (D-codiert)
Service interface, Round plug M12, 5-pin CService-Schnittstelle, Rundstecker M12, 5-polig
Power supply motor and electronic,
DLeistungs- und Elektronikversorgung,
Motion controller integrated E Integrierter Motioncontroller
1.2 Motor series BG 45 EC
• Brushless DC - servo-motors with integrated
motion controller, integrated rotor-position sensor
and EtherCAT interface.
•
dynamic performance, the compact design, the
wide regulation range, the low moment of inertia,
and robust construction.
• By means of the integrated incremental encoder
revolution, a very high positioning accuracy with
very good regulating characteristics can be achie-
ved.
• The most important parameters of a trajectory,
such as position, speed, and acceleration settings
can be changed via EtherCAT interface.
• The motor is excellent suitable for continuous ope-
ration because only the ball bearings of the
motor are wear parts.
• The motors BG 45 EC can be combined with
tuned gear ratios.
D
B
C
E
A