- 2 -
SPIDER PA
wSPIDER PAè un rilevatore volu-
metrico di presenza, con colle-
gamento filare.
wSPIDER PA è composto da un
doppio infrarosso, ideato per la
protezione sia interna che ester-
na.
wSPIDER PAè dotato di un micro-
processore che esegue un’ana-
lisi dei segnali provenienti dalle
due sezioni infrarosso e li gesti-
sce in base alla modalità di fun-
zionamento selezionata.
wSPIDER PAè dotato di un circui-
to che ne regola automaticamen-
te la sensibilità (Compensazio-
ne termica), mediante il micro-
processore, in base alla tempe-
ratura esterna.
wSPIDER PAè dotato di un circui-
to che evita il blocco del micro-
processore.
wSPIDER PAè dotato di un buz-
zer e di un led per dare una se-
gnalazione ottico-acustica (Walk
Test) anche se al sensore è ap-
plicato il blocco.
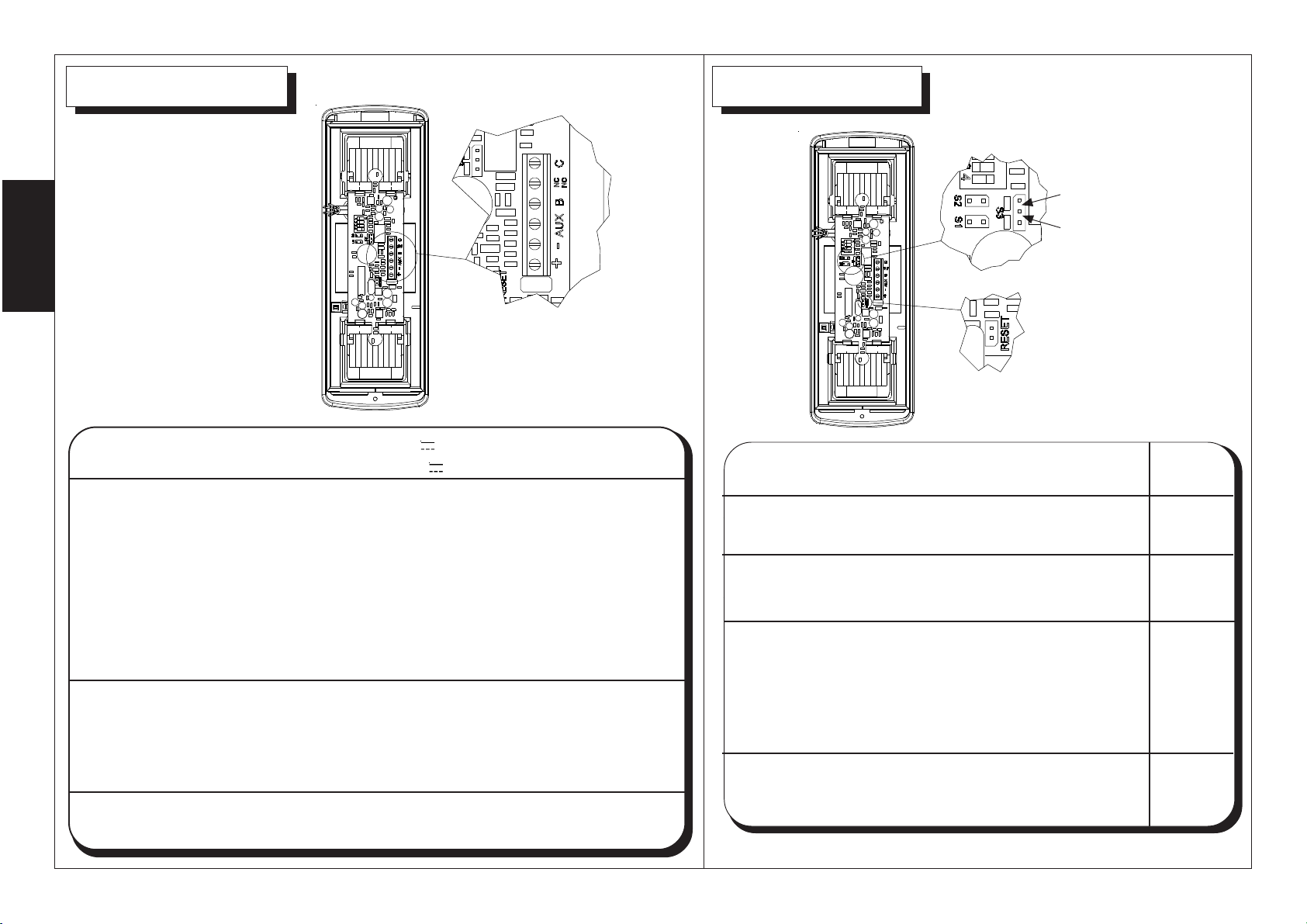
wSPIDER PAèdotatodi uningres-
so ausiliario (AUX) per poter ge-
stire in AND gli allarmi di un sen-
sore remoto.
wSPIDER PApuò adattare il cam-
po di copertura, in base alle esi-
genze, con i filtri in dotazione.
SPIDER PAWS
wSPIDER PAWS è un rilevatore volu-
metrico di presenza, con integrato il
modulo di trasmissione via radio a
singola frequenza compatibile con
satelliti o centrali AVS Electronics.
wSPIDER PAWS viene alimentato con
una batteria da 3.6 V al Litio.
wSPIDER PAWS è composto da un
doppio infrarosso, ideato per la prote-
zione sia interna che esterna.
wSPIDER PAWS è dotato di un circui-
to che ne regola automaticamente la
sensibilità(Compensazione termica),
in base alla temperatura esterna.
wSPIDER PAWS è dotato di un circui-
to che esegue un’analisi dei segnali
provenientidallesezioni infrarosso (In-
tegrazione).
wSPIDER PAWS è dotato di un buz-
zer e di un led per dare una segnala-
zione ottico-acustica (Walk Test).
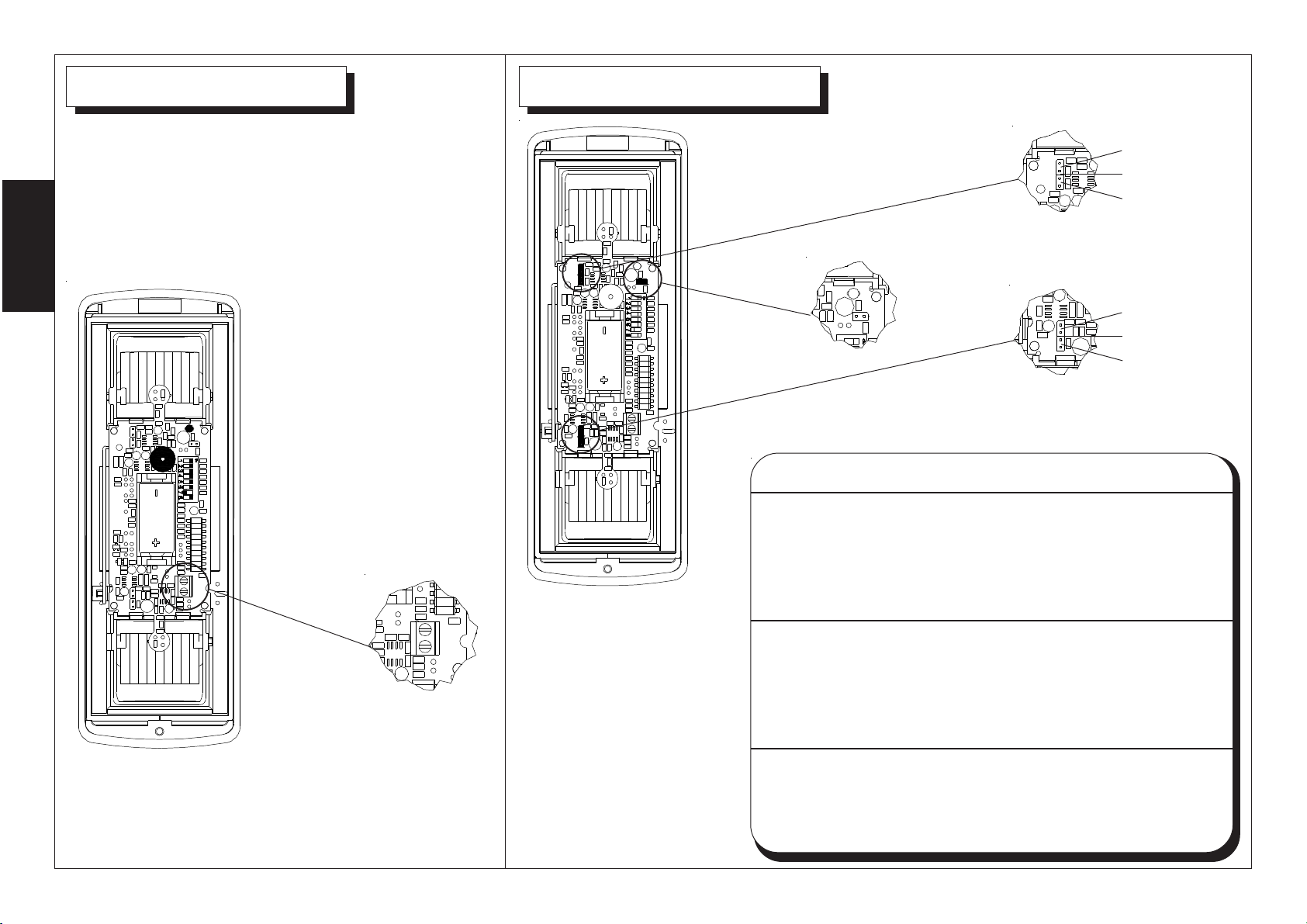
wSPIDER PAWS è dotato di un in-
gresso antimanomissione (T T) per il
collegamento del modulo tamper da
inserire sulla base.
wSPIDER PAWS può adattare il cam-
po di copertura, in base alle esigen-
ze, con i filtri in dotazione.
wSPIDER PAWS è dotato di un siste-
ma che invia una segnalazione perio-
dicadisopravvivenza eincasodibat-
teria bassa.
wSPIDER PAWS non è certificato IMQ
- SISTEMI DI SICUREZZA
NOTA: dove non è espressamente indicato, le istruzioni si riferiscono a tutti i modelli.
CARATTERISTICHE GENERALI SPIDER DUAL
wSPIDER DUAL èunrilevatorevo-
lumetrico di presenza, con colle-
gamento filare.
wSPIDER DUAL è composto da
undoppio infrarossoe dauna mi-
croonda planare , ideato per la
protezione sia interna che ester-
na.
wSPIDER DUAL è dotato di un
microprocessore che esegue
un’analisi dei segnali e li gesti-
sce in base alla modalità di fun-
zionamento selezionata.
wSPIDER DUAL è dotato di un cir-
cuitocheregolaautomaticamente
la sensibilità della sezione infra-
rossi(Compensazione termica),
mediante il microprocessore, in
base alla temperatura esterna.
wSPIDER DUAL è dotato di un cir-
cuito che evita il blocco del mi-
croprocessore.
wSPIDER DUAL èdotatodiunbuz-
zer e di un led per dare una se-
gnalazione ottico-acustica (Walk
Test) anche se al sensore è ap-
plicato il blocco.
wSPIDER DUAL è dotato di un cir-
cuito antimascheramento che si
attivase viene avvicinatodel ma-
terialeriflettente le microonde
wSPIDER DUAL può adattare il
campo di copertura, in base alle
esigenze, con i filtri in dotazione.
FUNZIONAMENTO
PRIMA ALIMENTAZIONE
Alla prima alimentazione, SPIDER PA
eSPIDER DUAL rimangono inibiti per
un tempo di circa 30 secondi, durante
i quali sia il buzzer che il led emettono
una segnalazione intermittente.
Alla prima alimentazione, SPIDER PA
WS rimane inibito per un tempo di cir-
ca 2 minuti.
ANALISI DEL SEGNALE
( SPIDER PA- SPIDER DUAL )
Il segnale generato da ogni singola se-
zione viene analizzato secondo i se-
guenti parametri:
wAmpiezza dell’impulso: deve esse-
re superiore ad una soglia prefissata
se positivo, o inferiore se negativo.
wDurata dell’impulso: peressere con-
sideratovalidodeve rientrareinun de-
terminato intervallo di tempo.
wDistanza tra gli impulsi: viene con-
siderato valido (con la configurazio-
neindoppiasemionda)sealmeno due
impulsi consecutivi di segno opposto
della stessa sezione, sono compresi
in un determinato intervallo di tempo.
wPolarità degli impulsi (solo sezio-
ne infrarossi) : essendo i due PIR
rovesciatiunorispetto all’altro, dueim-
pulsi consecutivi della stessa sezio-
ne, o due singoli impulsi di entrambe
le sezioni devo sempre essere di se-
gno opposto.