UMAX030440 Version 2B 3-51
TABLE OF CONTENTS
1.1. INTRODUCTION TO AX030440 FEATURES.................................................................................................................. 4
1.2. J1939 NETWORK –DIAGNOSTIC BROADCAST ........................................................................................................... 4
1.3. UNIVERSAL INPUT..................................................................................................................................................... 5
1.3.1. Control Sources............................................................................................................................................................5
1.3.2. Universal Input Type ....................................................................................................................................................5
1.3.3. Universal Input Range.................................................................................................................................................. 5
1.3.4. Universal Input Analog Filter........................................................................................................................................6
1.3.5. Universal Input Error and Range..................................................................................................................................6
1.3.6. Universal Input Digital Input Parameters.....................................................................................................................6
1.3.7. Universal Input Frequency/PWM Parameters .............................................................................................................7
1.3.8. Universal Input Data Filter ...........................................................................................................................................8
1.3.9. Universal Input Diagnostic Parameters........................................................................................................................8
1.4. MISCELLANEOUS...................................................................................................................................................... 8
1.5. DIAGNOSTICS........................................................................................................................................................... 9
1.6. CONSTANT DATA.................................................................................................................................................... 11
1.7. MATH FUNCTION BLOCK......................................................................................................................................... 11
1.8. PROGRAMMABLE LOGIC FUNCTION BLOCK ............................................................................................................. 12
1.9. LOOKUP TABLE FUNCTION BLOCK.......................................................................................................................... 13
1.10. CONDITIONAL BLOCK ........................................................................................................................................... 14
1.11. SET /RESET LATCH FUNCTION BLOCK.................................................................................................................. 15
1.12. CAN TRANSMIT FUNCTION BLOCK........................................................................................................................ 15
1.13. CAN RECEIVE FUNCTION BLOCK.......................................................................................................................... 16
2. OVERVIEW OF J1939 FEATURES....................................................................................................................... 18
2.1. INTRODUCTION TO SUPPORTED MESSAGES............................................................................................................. 18
2.2. J1939 NAME,ADDRESS AND SOFTWARE ID............................................................................................................ 19
2.2.1. J1939 Name................................................................................................................................................................19
2.2.2. ECU Address ...............................................................................................................................................................19
2.2.3. Software Identifier .....................................................................................................................................................20
3. ECU SETPOINTS ACCESSED WITH ELECTRONIC ASSISTANT...................................................................... 21
3.1. J1939 NETWORK SETPOINTS.................................................................................................................................. 21
3.2. UNIVERSAL INPUT SETPOINTS................................................................................................................................. 21
3.3. MISCELLANEOUS SETPOINTS .................................................................................................................................. 22
3.4. DIAGNOSTIC SETPOINTS ......................................................................................................................................... 23
3.5. CONSTANT DATA LIST SETPOINTS .......................................................................................................................... 24
3.6. MATH FUNCTIONAL BLOCK SETPOINTS ................................................................................................................... 24
3.7. PROGRAMMABLE LOGIC BLOCK SETPOINTS............................................................................................................ 26
3.8. LOOKUP TABLE SETPOINTS .................................................................................................................................... 28
3.9. CONDITIONAL BLOCK SETPOINTS............................................................................................................................ 29
3.10. SET-RESET LATCH BLOCK ................................................................................................................................... 30
3.11. CAN TRANSMIT SETPOINTS.................................................................................................................................. 31
3.12. CAN RECEIVE SETPOINTS.................................................................................................................................... 33
3.13. 5V TO 8V REFERENCE SWITCH ............................................................................................................................. 34
4. REFLASHING OVER CAN WITH ELECTRONIC ASSISTANT BOOTLOADER ................................................. 35
4.1. PREREQUISITES...................................................................................................................................................... 35
4.2. RE-FLASHING PROCEDURE ..................................................................................................................................... 35
5. INSTALLATION INSTRUCTIONS ......................................................................................................................... 40
6. TECHNICAL SPECIFICATIONS............................................................................................................................ 41
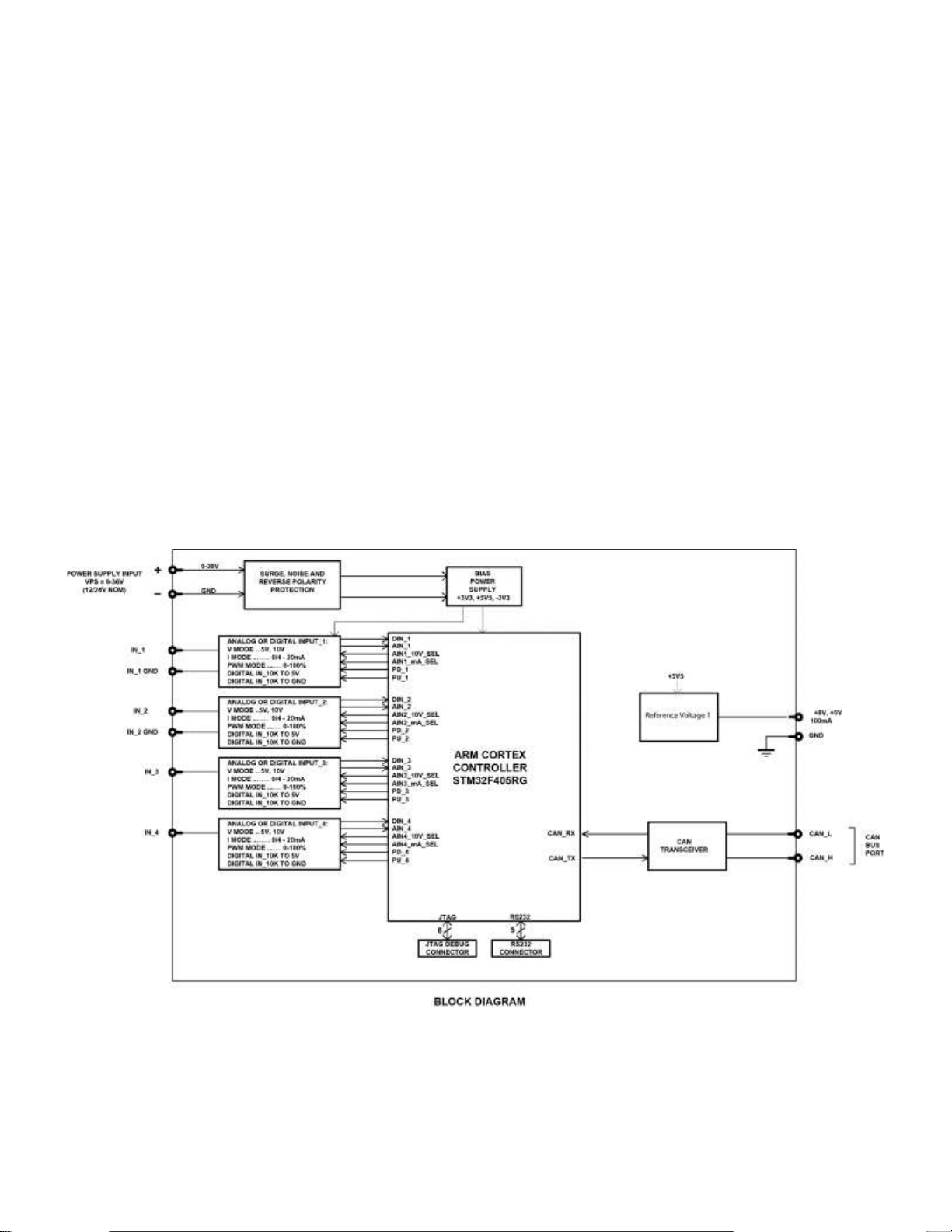
Reverse polarity protection up to -100V..................................................................................................................................41
User selectable .........................................................................................................................................................................41
+5V/+8V, 100 mA, 2% reference voltage output......................................................................................................................41
7. VERSION HISTORY............................................................................................................................................... 43