Page 3of 18 Fuji Electric Europe GmbH
CONTENTS
0. Introduction..........................................................................................................................4
1. Connections.........................................................................................................................4
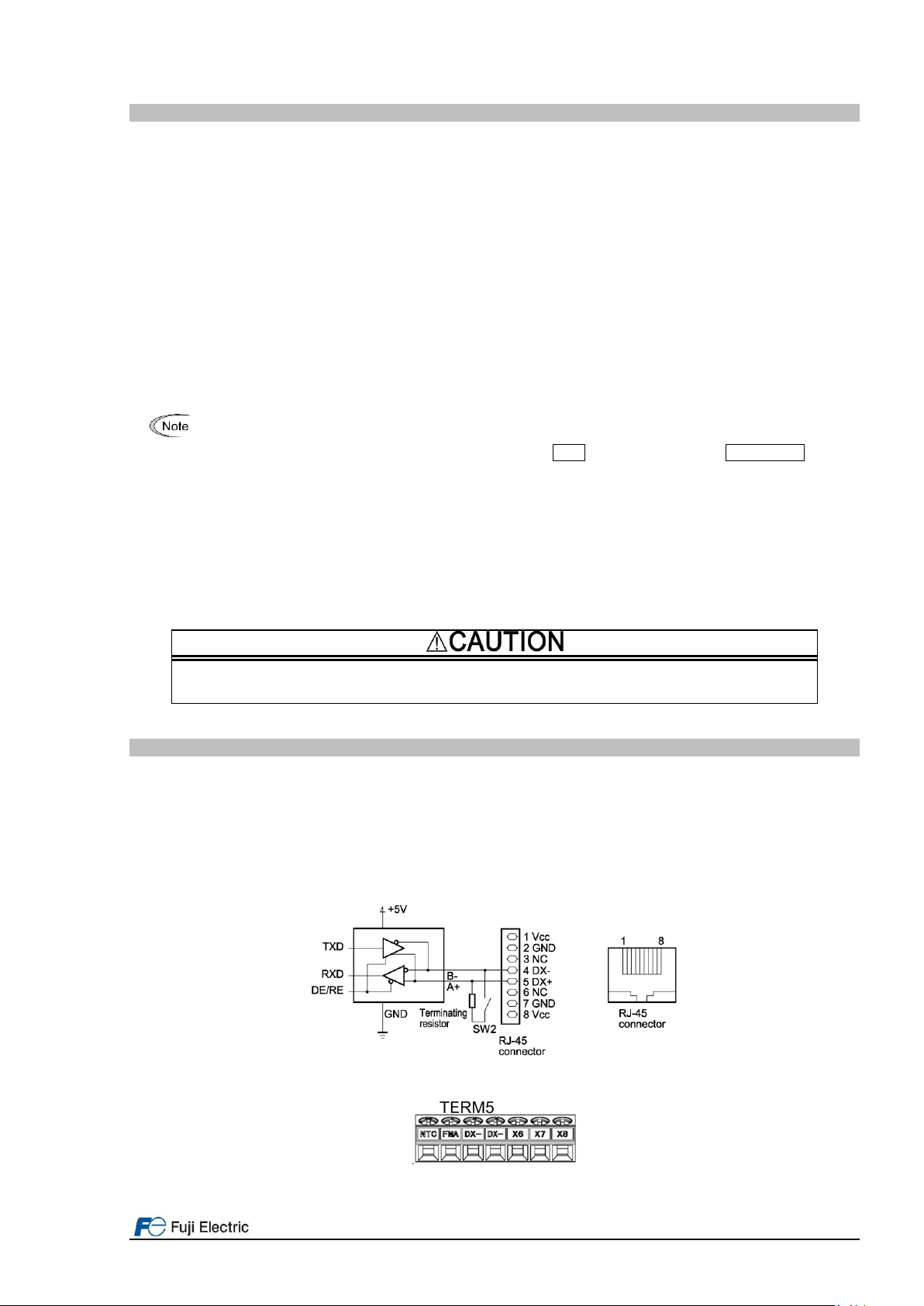
1.1 RS485 bus terminals.....................................................................................................4
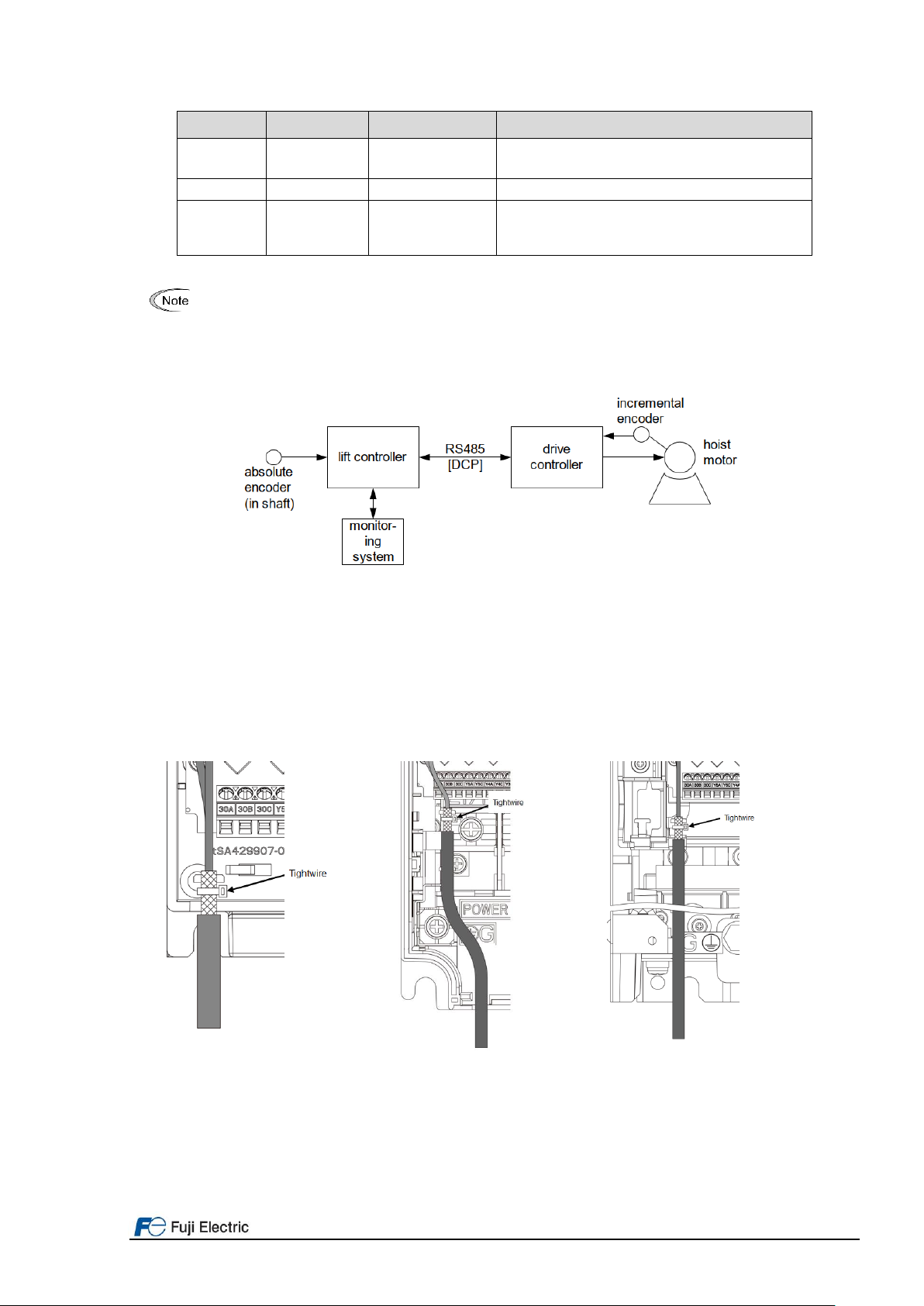
1.2 Shield connection..........................................................................................................5
1.3 Terminal resistor............................................................................................................6
2. Remote display ....................................................................................................................6
2.1 Remote display keys .....................................................................................................6
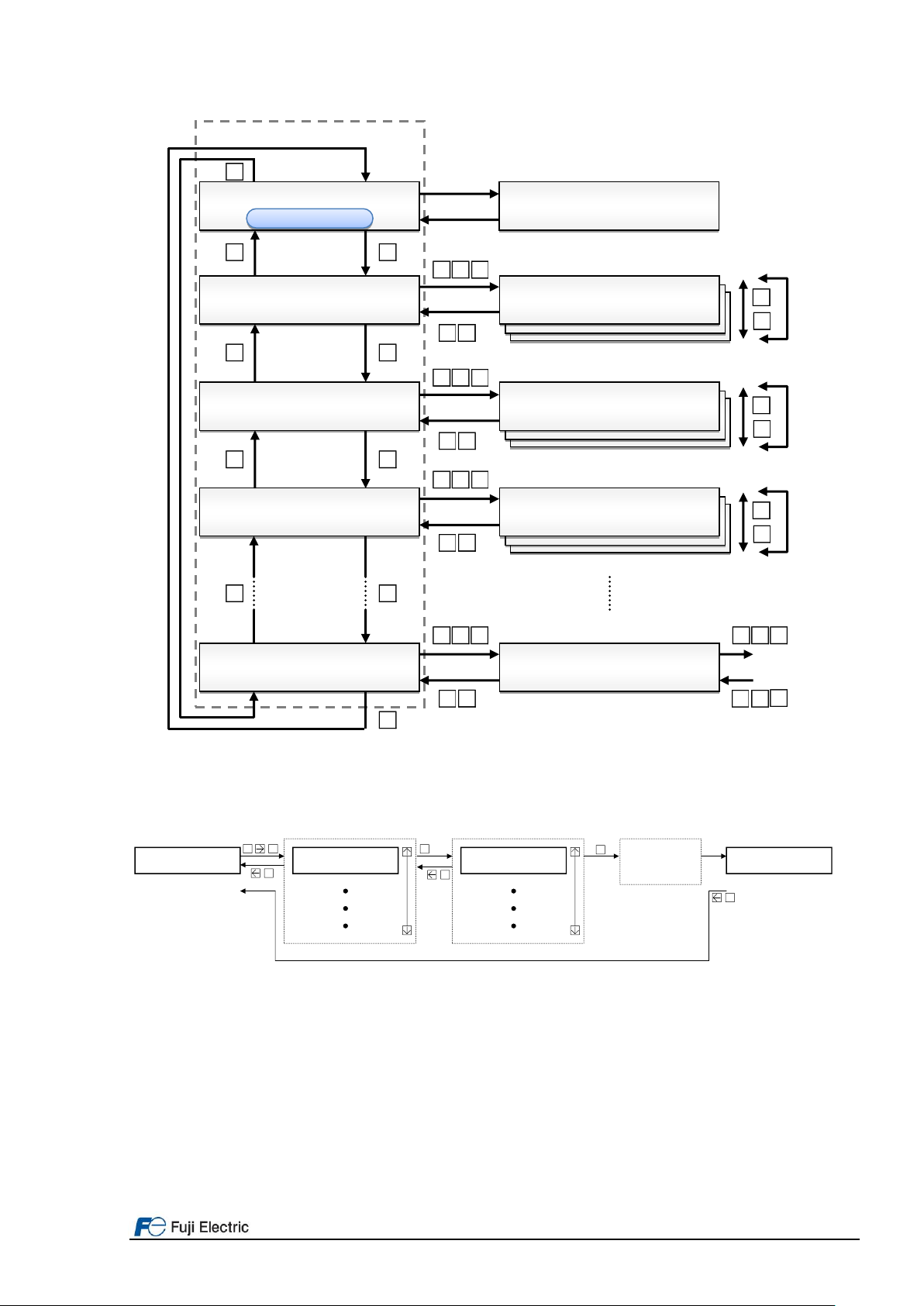
2.2 Remote display menus..................................................................................................7
3. Basic setting.......................................................................................................................10
3.1 DCP bus setting ..........................................................................................................10
3.2 Lift / motor basic setting...............................................................................................10
3.3 Lift speeds...................................................................................................................11
4. Start-up..............................................................................................................................12
5. Lift speed profile settings....................................................................................................13
5.1 DCP 3 (Lift controller without absolute sensor system)................................................13
5.2 DCP 4 (Lift controller with absolute sensor system).....................................................14
6. Signals timing diagram in DCP...........................................................................................15
6.1 DCP 3 (Speed mode)..................................................................................................15
6.2 DCP 4 (Remaining distance mode) .............................................................................16
7. Travel optimization (Remaining distance mode).................................................................17