Start by studying the safety information on the next page. Propellers
can cause damage and must therefore be distributed at the end.
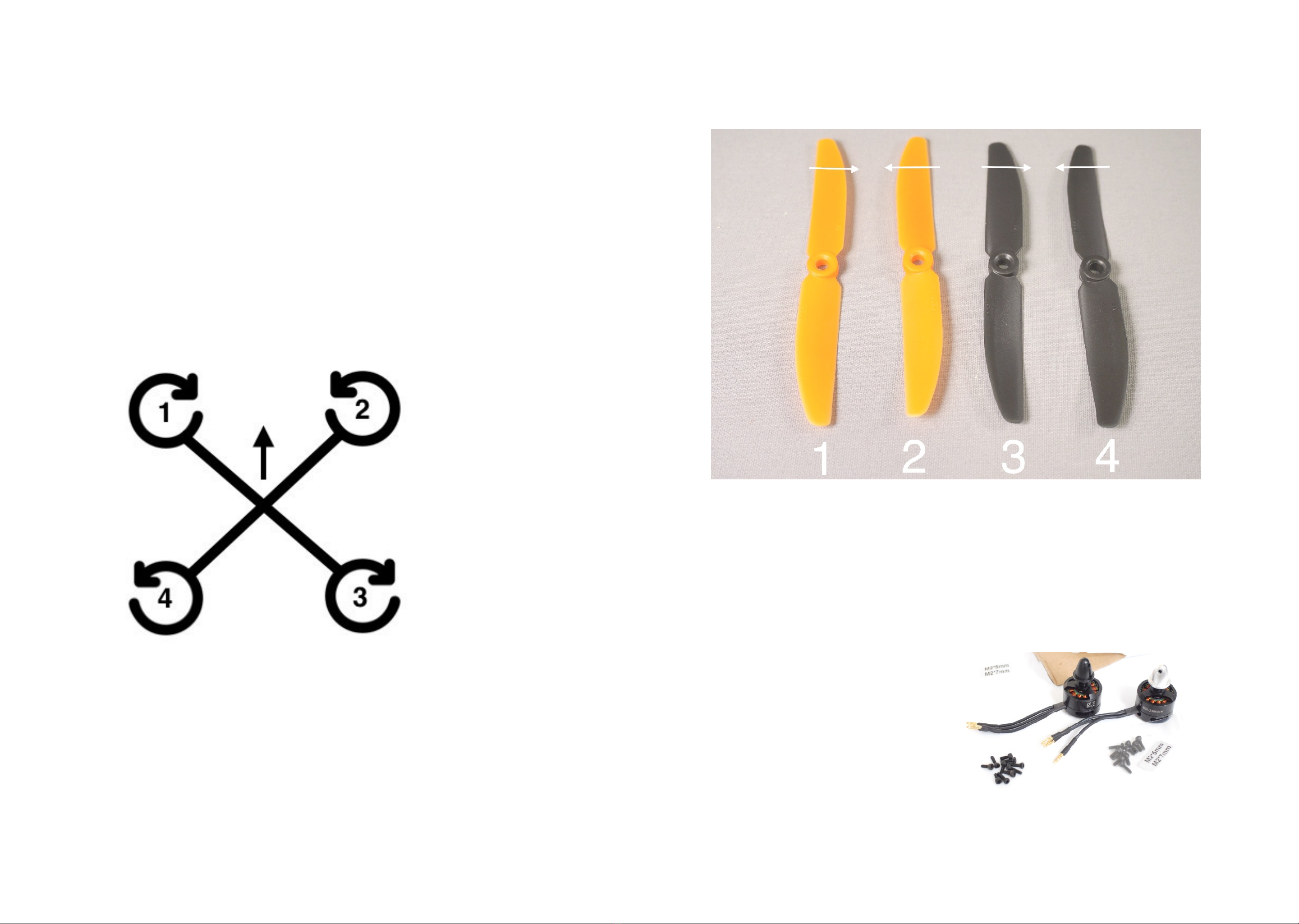
Paper propellers are used temporarily to test that the motors are
going in the right direction.
2
Construction plan:
There are four main areas, which should be done in this order:
assembly, electrical connections, programming and flying. !
You are welcome to delegate the four tasks to different students,
who are each given their own main responsibility, which they can
later roll on (especially the flight).!
Once the drone is built and the electrical connection is made, check
the following before getting the battery:!
Layout, page 8. Silver motor in the right place. Two different colors
of propeller protectors, one at the front and another at the rear.
(Color may vary).!
Wiring diagram, page 15. It is especially important not to switch
between + and - between ESC (speed controllers) and power
distribution boards, as well as not to change the battery measuring
cable and speaker cable.!
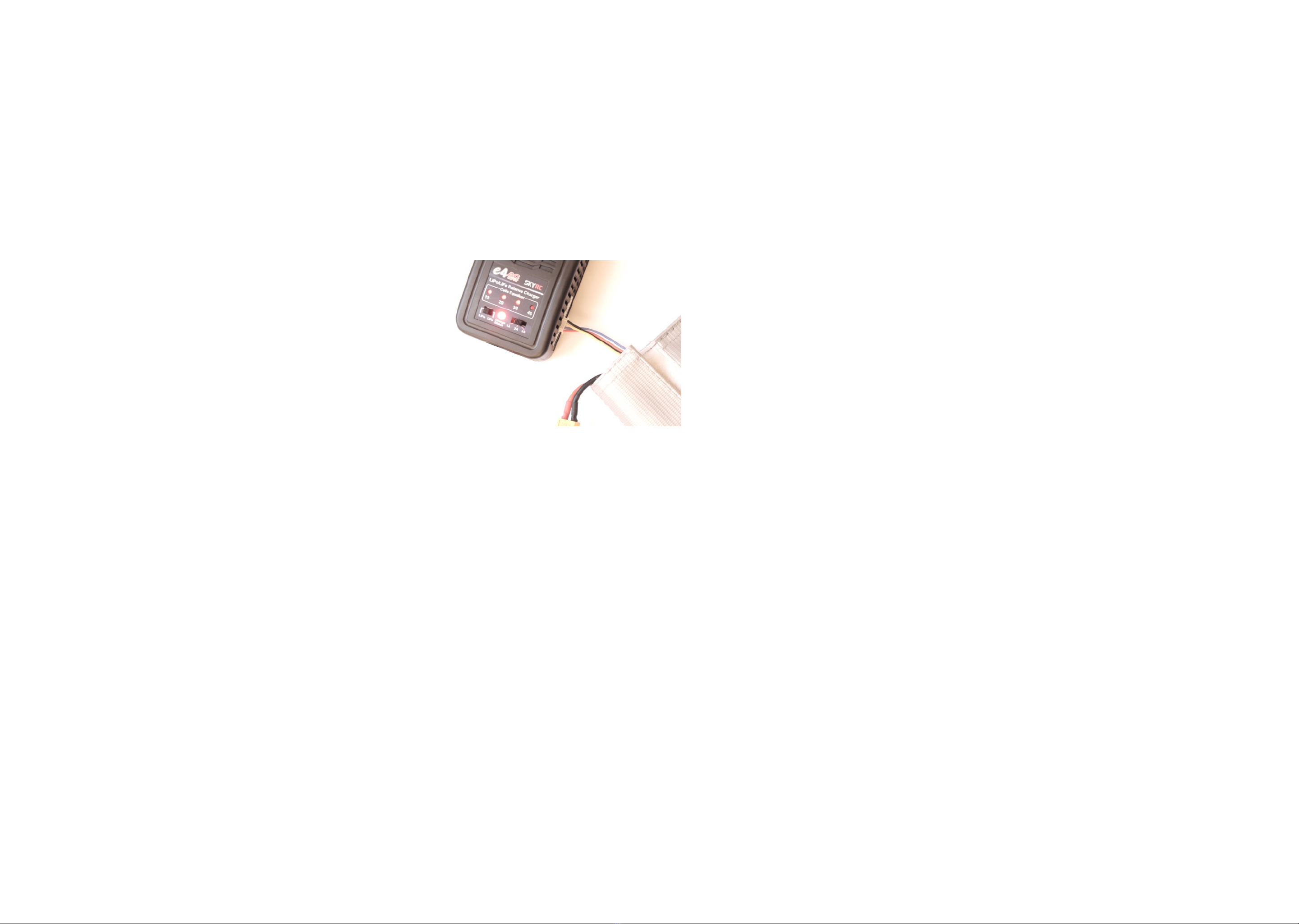
Charge the batteries. Put the battery in the
enclosed charging bag. All lights should be
green before charging is complete after 1-2
hours.!
Insert 4 AA batteries into the radio. We
recommend rechargeable batteries for the sake
of the environment.!
The drone flies for 11-13 minutes on one battery.!
Reset the drone's control card by selecting
“factory reset” which is located at the very
bottom of the menu.!
•When they have finished programming, you or students
(other than those who have programmed) should check the
following:!
•The paper propellers should rotate straight in accordance
with the layout, page 8.!
•Review receiver test, page 18. Check that the movements of
the connectors are correctly reflected on the screen. Throttle
= gas, left stick down = 0, up = about 100!
•Yaw (rudder) = side rotation, left stick to the right / left results
in “rudder left / right” +/- about 100!
•Pitch (elevator), right stick forwards or backwards, +/-
approx. 100!
•Roll (aileron), right stitch to the side, +/- approx. 100!
•Check that all wires and components are attached correctly
and that no wires or antenna can be cut by the propellers.!
•Once this has been checked, you can distribute the
propellers. It is important to distinguish between up and
down, as well as right- and left-rotating propellers. See page
9. Make students aware of the dangers associated with
propellers.!
Flight:
The pilot and the rest of the team take the drone to a suitable
flight area. Gym or other open space indoors is the safest and
is unregulated by FAA and aviation authorities. Avoid third
persons entering the flight area and especially smalle children
must be kept at a safe distance. Low ceiling height can also be
an advantage as you can not crash from a great height.!
Outdoors, large grass pitches are the best place to fly as it is
open, and the surface is soft and damages the drone less in the
event of a crash. Provide the required safety distance to
outsiders. Check local rules regarding flight outdoors.
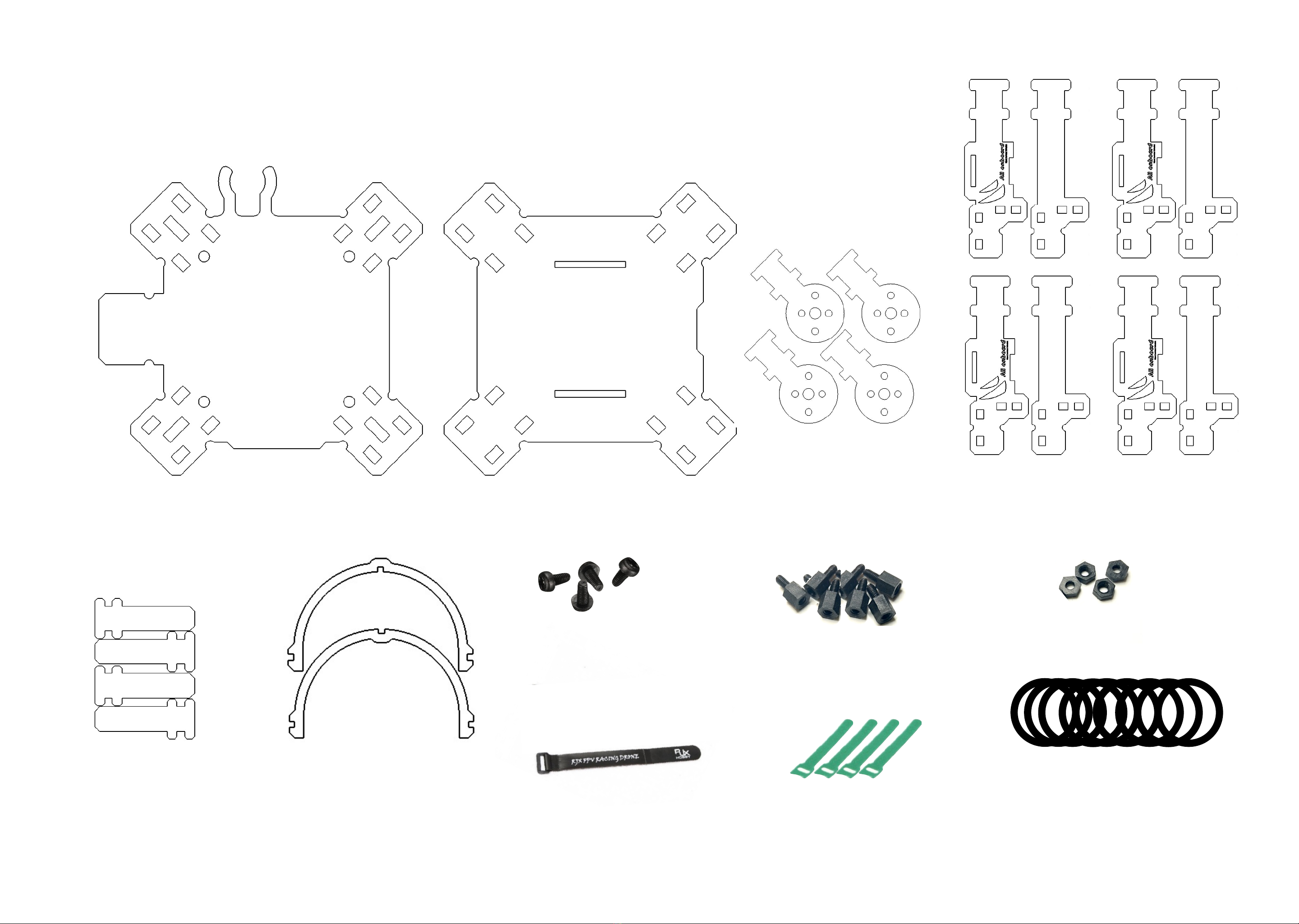
Tools:
1.5mm Allen or Torx. Star puller medium size. Scissors if you
want to cut out paper propellers.!
To the teacher