Table of Contents iii
www.ocularrobotics.com Ocular Robotics Ltd
Table of Contents
Revision Table...............................................................................................................................................................................ii
Table of Contents........................................................................................................................................................................iii
1 Introduction...............................................................................................................................................................................1
2 Basics ............................................................................................................................................................................................2
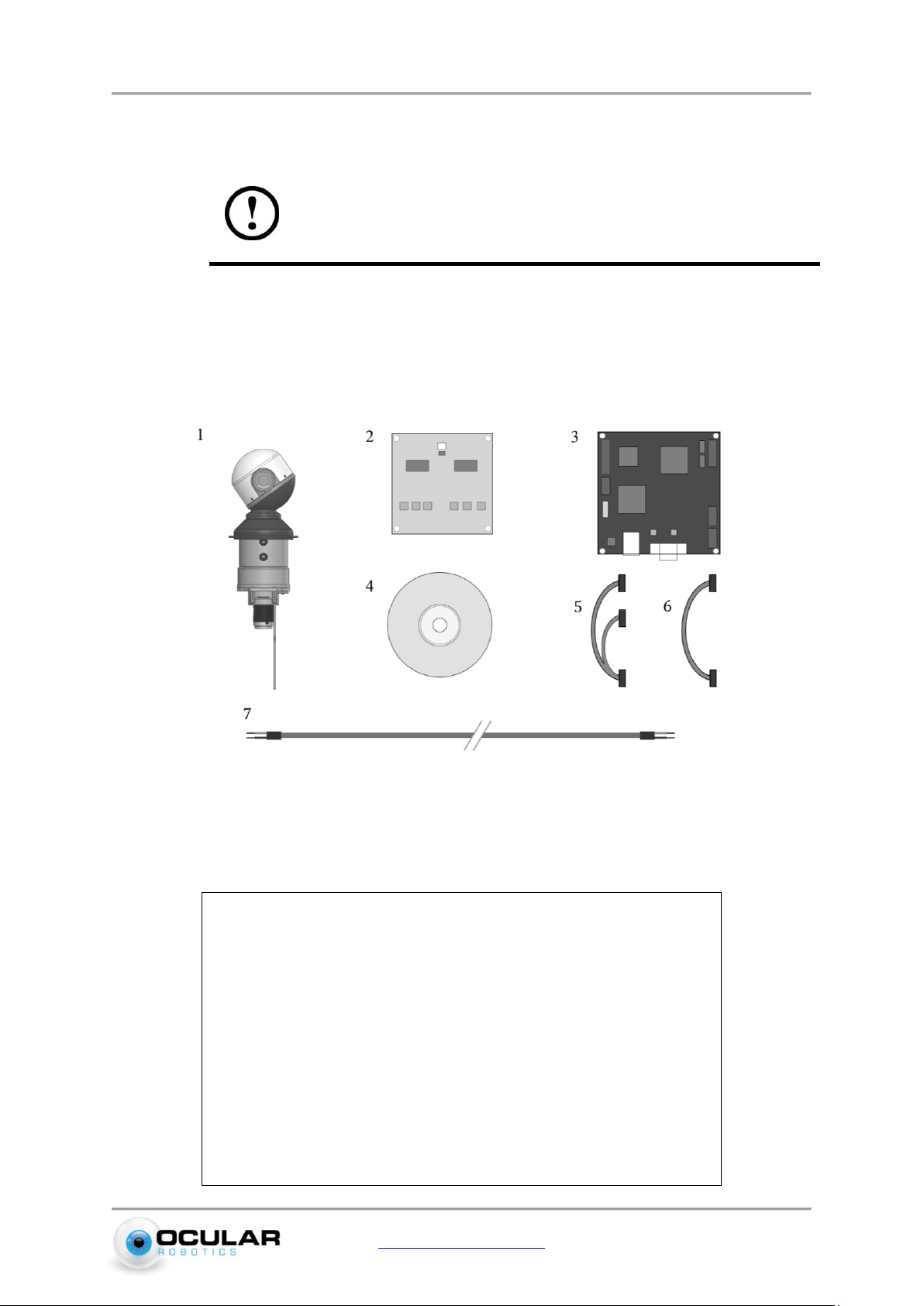
2.1 System Components ......................................................................................................................................................2
2.1.1 REV25-ST VISION - STABILIZED Unit ...........................................................................................................2
2.1.2 REV25-ST VISION - STABILIZED System .....................................................................................................3
2.2 What You Need.................................................................................................................................................................4
2.3 Handling and Transportation....................................................................................................................................4
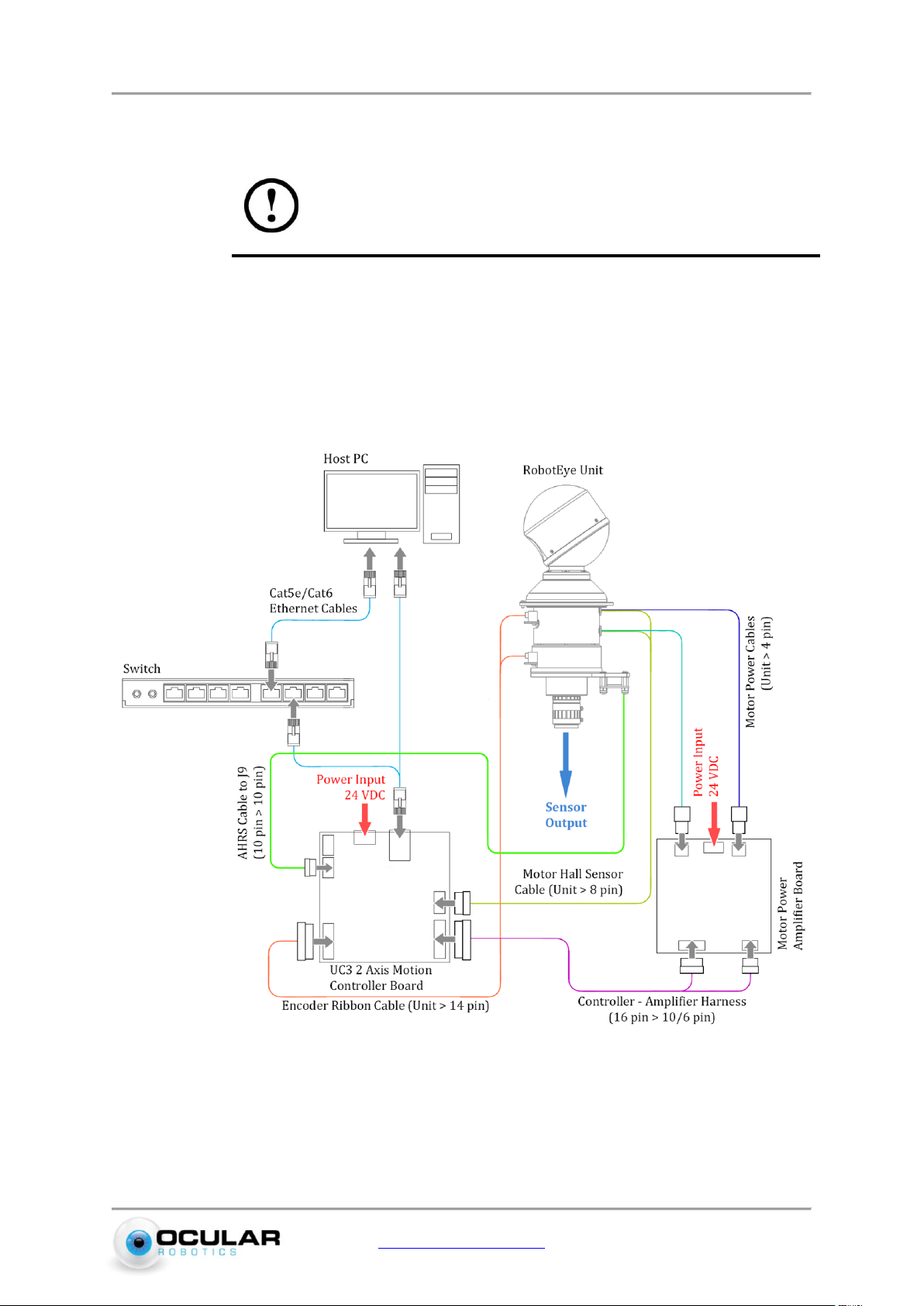
2.4 Initial Setup .......................................................................................................................................................................5
2.4.1 REV25-ST VISION - STABILIZED Unit ...........................................................................................................5
2.4.2 REV25-ST VISION - STABILIZED System .....................................................................................................7
2.5 Safety................................................................................................................................................................................. 10
2.6 Operation......................................................................................................................................................................... 11
2.7 Cleaning and Maintenance....................................................................................................................................... 12
2.7.1 Replacement Parts.............................................................................................................................................. 12
3 General Description............................................................................................................................................................. 13
3.1 Electrical.......................................................................................................................................................................... 13
3.2 Power................................................................................................................................................................................ 13
3.2.1 REV25-ST VISION - STABILIZED Unit ........................................................................................................ 13
3.2.2 REV25-ST VISION - STABILIZED System .................................................................................................. 13
3.3 Mechanical...................................................................................................................................................................... 15
3.3.1 REV25-ST VISION - STABILIZED Unit ........................................................................................................ 15
3.3.2 REV25-ST VISION - STABILIZED System .................................................................................................. 17
3.4 Ethernet ........................................................................................................................................................................... 19
3.4.1 REV25-ST VISION - STABILIZED Unit ........................................................................................................ 19
3.4.2 REV25-ST VISION - STABILIZED System .................................................................................................. 19
3.4.3 Network Topology.............................................................................................................................................. 20
3.5 Optical............................................................................................................................................................................... 21
3.5.1 Field of View.......................................................................................................................................................... 21
3.5.2 Camera Mounting................................................................................................................................................ 22
3.5.3 Camera Focus and Aperture........................................................................................................................... 23
3.5.4 Modulation Transfer Function ...................................................................................................................... 23
4 Specifications.......................................................................................................................................................................... 24