2. Purpose 2
3. General 2
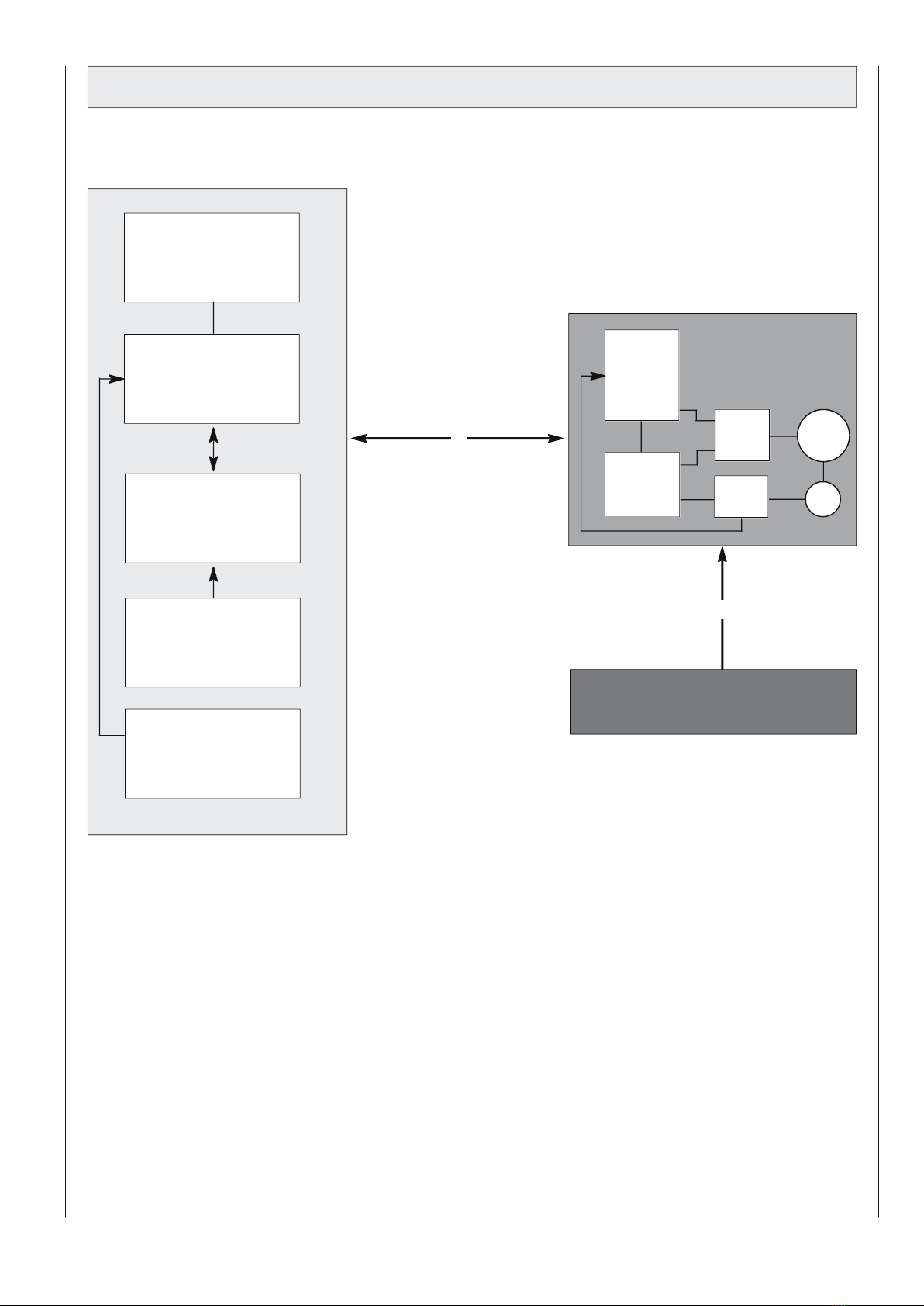
5. Block diagram of the electronic
parts ARTROMOT®-K1
6. Bill of material for service parts ARTROMOT®-K1
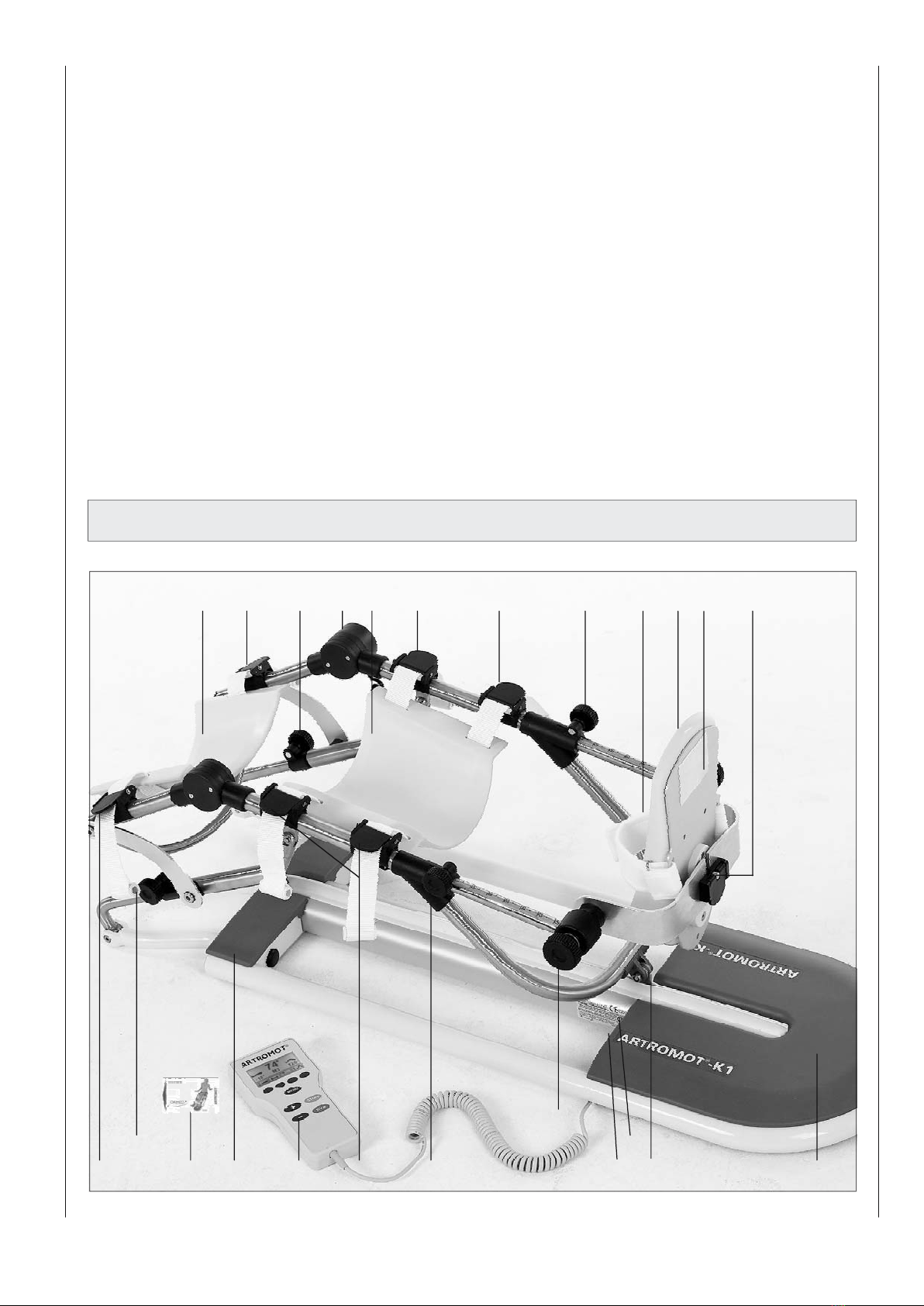
7. Figure for bill of material
8. Special function Service menu for
ARTROMOT®-K1Comfort and Standard version
9. Special function Service menu for
ARTROMOT®-K1Classic
10. How to perform repairs
11. Checklist of safety and function test
ARTROMOT®-K1Comfort and Standard version
12. Checklist of safety and function test
6
7
8
10
12
14
15
16
simple repairs on the ARTROMOT®-K1. Only authorized
staff may perform repairs and maintenance as the manufac-
turer’s warranty and liability would otherwise be invalidated.
Only original parts may be used for servicing in accordance
the attached spare parts list.
1
2
3
4
unit is switched on. Always switch the ARTROMOT®-K1
off before connecting or disconnecting a plug.
The locks for spiral cable for the hand-held program-
ming unit have to be closed at all times.
When you assembling with electronic parts make sure
to use ESD (Electro Static Discharge) equipment.
Only original chip cards may be used. Insert the chip
cards so that ARTROMOT® is visible.
If you have to exchange any of the printed circuit boards
including the knee electronics, hand held programming
unit, motor control or power supply electronics you have
to perform a calibration.
Possible errors: Errors will be displayed on the hand-
held programming unit as follows shown:
Wrong angle information
-> Replace knee electronics (Pos. 5)
-> Replace motor control (Pos. 25)
Connection to the potentiometer is interrupted
-> Replace knee electronics (Pos. 5)
-> Replace motor control (Pos. 25)
The motor driver IC reported an error
The motor did not turn properly
-> Replace the motor (Pos. 26)
1 10.02.2006 S. Herr Service Manual
created
2 14.07.2006 S. Herr Pos. 25,
chapter 10
3 14.08.2006 S.Herr Pos. 20,
Chapter 9, 12
XX