Sanbot Max Product Instruction for Standard Version
Introduction
Thanks for purchasing our company product!
Please carefully read this Instruction before using the Sanbot Max Standard version robot
(hereinafter referred to as Sanbot Max Std), so you can operate this robot very easily as soon as
possible.
Please keep this instruction properly after reading it.
Robot is a self-operating equipment, and improper operation will lead to accidents or
injuries.
Please refer to this instruction and other related guidelines to make sure safety installation
and usage.
Sanbot Max Std application scenario and main function
Sanbot Max Std integrates the function of consultation, guidance, propaganda,
entertainment. It provides music and dance, gesture propaganda, guidance, track inspection, visitor
reception, chat consultation for enterpriser, mall, hotel, bank, hospital, government affair hall and
other place. With powerful function, Sanbot Max Std can satisfy repeated job post demand in
service links of all kinds of enterprises and partial replace correspond post staff to save the cost of
staff and management and increase service efficiency, therefore reaching continuous profit.
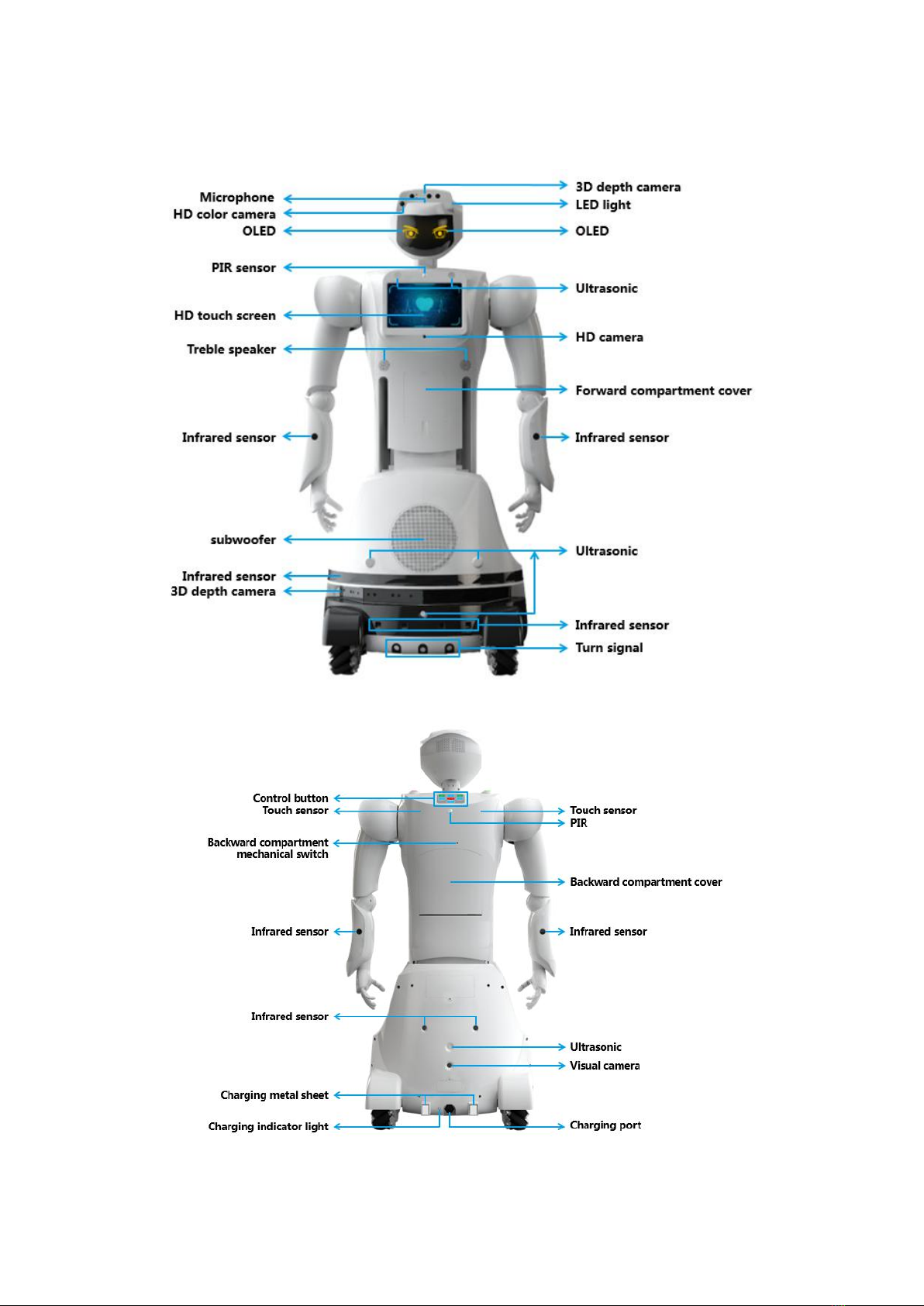
1. There are 10 degrees of freedom on Sanbot Max Std’s two arms and 10 degrees of freedom
on Sanbot Max Std’s two palms. With the rotation of 2 degrees of freedom on the head, it can
realize the display of diversified gesture and actions, like greeter and dance.
2. Sanbot Max Std has a comprehensive robot vision, equipped with HD color camera, HD
camera, visual camera, for security protection, video call, visual positioning and visual
recognition etc., function.
3. Sanbot Max Std has 11 touch sensors, 2 OLED eye displays, 4 atmosphere lamps, and all of
them can be triggered or flexible switch based on different scenario.
4. Sanbot Max Std adopts voice interaction solution with 6 microphones pickup, which can
make voice localization, echo cancellation beam orientation, high frequency gain,