6F2T0 1 7 2
2. Application Notes
2.1 Phase Overcurrent and Residual Overcurrent Protection
GRE110 provides protection for radial distribution networks with phase fault and earth fault
overcurrent elements OC1 to OC4 and EF1 to EF4*. The protection of local and downstream
terminals is coordinated with the current setting, time setting, or both.
*at model 400, 401 and 402, the earth fault current input may be connected either in the residual
circuit of the phase CTs, or alternatively a dedicated earth fault CT may be used. In the case of
connection in the residual circuit of the phase CTs, the settings of the phase CT ratio OCCT and the
earth fault CT ratio EFCT should be equal. On the other hand, where a dedicated earth fault CT is
applied, thenthe settings of OCCT and EFCT should NOT be equal, and in this case the measuring
range of earth fault current is limited to 20A maximum (see section 2.2.5).
** On GRE110-820 and 821 models, current inputs are A phase and C phase only. The B phase
element is currucurate from A phase and C phase current for metering function. But B phase
cullcurated current is not for protection and recording function. So the B phase current is not
operate at the some scheme logic.
2.1.1 Inverse Time Overcurrent Protection
In a system for which the fault current is practically determined by the fault location, without being
substantially affected by changes in the power source impedance, it is advantageous to use inverse
definite minimum time (IDMT) overcurrent protection. This protection provides reasonably fast
tripping, even at a terminal close to the power source where the most severe faults can occur.
Where ZS (the impedance between the relay and the power source) is small compared with that of
the protected section ZL, there is an appreciable difference between the current for a fault at the far
end of the section (ES/(ZS+ZL), ES: source voltage), and the current for a fault at the near end
(ES/ZS). When operating time is inversely proportional to the current, the relay operates faster for
a fault at the end of the section nearer the power source, and the operating time ratio for a fault at
the near end to the far end is ZS/(ZS + ZL).
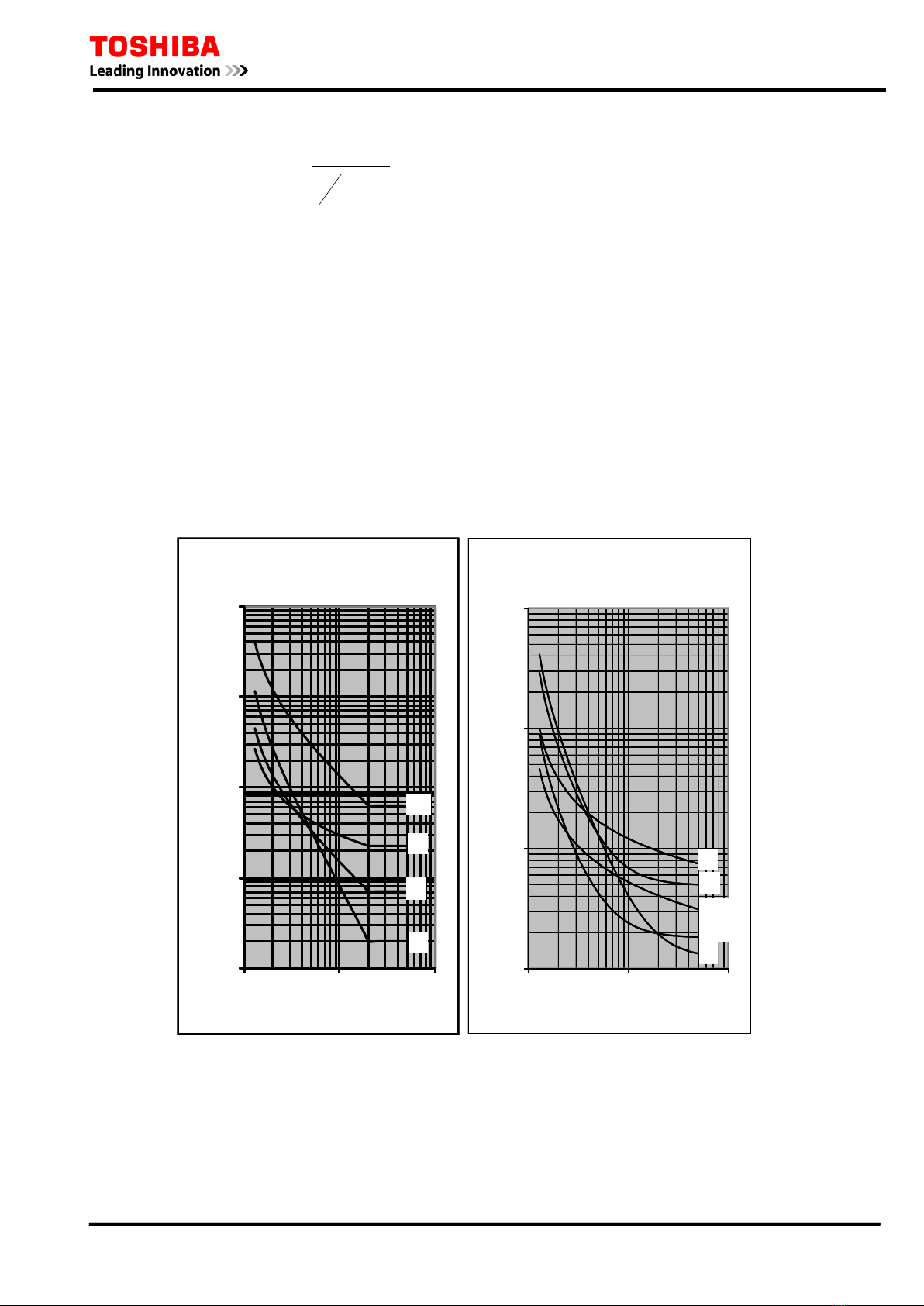
The resultant time-distance characteristics are shown in Figure 2.1.1 for radial networks with
several feeder sections. With the same selective time coordination margin TC as the downstream
section, the operating time can be further reduced by using a more inverse characteristic.
Figure 2.1.1 Time-distance Characteristics of Inverse Time Protection
The OC1 and EF1 elements for stage-1 have IDMT characteristics defined by equation (1) in
accordance with IEC 60255-151:
8