5
Fahrzeuge mit S-Schnittstelle
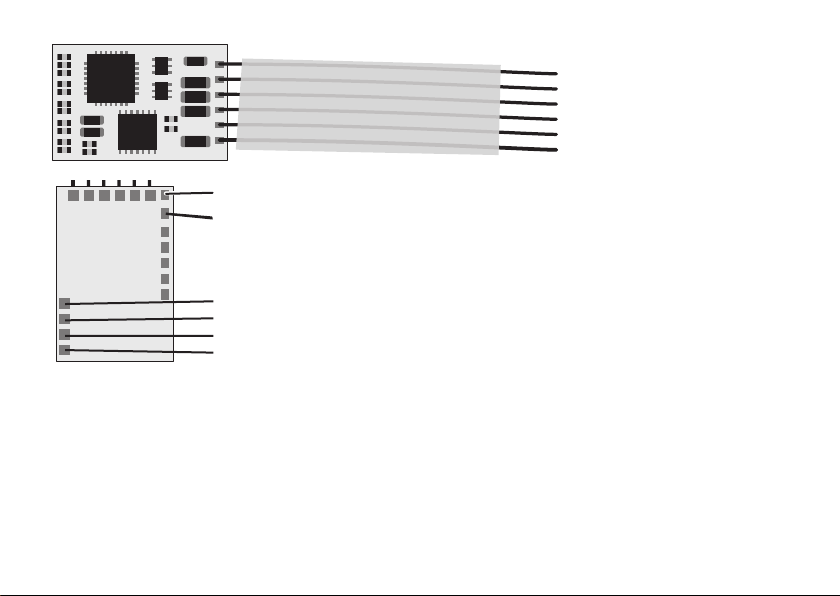
Entfernen Sie die in der Lok eingebaute Steckerplatine.
Kürzen Sie die Anschlussdrähte des Decoders auf eine Län-
ge von ca. 5 mm – 10 mm und entfernen Sie die Isolierung.
Stecken Sie den Decoder, falls vom Hersteller der Lok nicht
anders vermerkt, mit den Bauteilen nach oben in die Schnitt-
stelle. Die Anschlussdrähte sollten gerade eingesteckt wer-
den und müssen eventuell anschließend leicht abgewinkelt
werden. Es dürfen keine Verbindungen zu anderen Drähten
oder Leiterbahnen entstehen!
Einbau des Decoders in Fahrzeuge ohne Schnittstelle
Um Garantieansprüche nicht zu gefährden, empfehlen wir,
den Einbau des Decoders in Loks ohne Schnittstelle durch
den autorisierten Fachhandel vornehmen zu lassen.
Sämtliche Verbindungen zwischen Motor und den Gleisan-
schlüssen sind aufzutrennen (Schleifer, Chassis etc.) Der
Motor muß massefrei sein! Wird eine Verbindung überse-
hen, kann dies zur Zerstörung des Decoders führen.
Vor der Inbetriebnahme unbedingt nochmals prüfen, dass
der Decoder oder seine Anschlüsse keine Berührung mit
metallisch leitenden Flächen haben.
Selectrix (Sx1)
Die von Sx1 unterstützten Parameter können durch
Programmieren beliebig oft geändert werden. Die Angaben
zum Programmieren der Standard-Parameter sowie der
erweiterten Parameter entnehmen Sie bitte den Unterlagen
Ihres Programmiergerätes.
Werkseinstellung der Standard-Parameter:
01-542
Werkseinstellung der erweiterten Parameter
00-413
Hinweis:
Das Lesen und Schreiben der erweiterten Kennwerte über-
schreibt die Standard-Kennwerte des Decoders. Deshalb
müssen nach dem Bearbeiten der erweiterten Kennwerte
die Standard-Kennwerte erneut eingegeben werden.
Selectrix 2 (Sx2)
Die Eigenschaften der Lok für Sx2-Betrieb können durch die
Programmierung der Parametern (PAR) beliebig oft geändert
werden. Angaben zur Programmierung der Parameter ent-
nehmen Sie bitte den Unterlagen Ihres Programmiergerätes.
Beachten Sie hierzu auch die Parameter-Tabelle auf Seite 8.
DCC
Die Eigenschaften der Lok für DCC-Betrieb können durch die
Programmierung der Configurations Variablen (CV) beliebig
oft geändert werden. Angabe zur Programmierung der CV
entnehmen Sie bitte den Unterlagen Ihres Programmierge-
rätes. Beachten Sie hierzu auch die CV-Tabelle auf Seite 8.