NEO-M9N-Integration manual
3.9 Multiple GNSS assistance (MGA)..................................................................................................... 33
3.9.1 Authorization................................................................................................................................ 33
3.9.2 Preserving MGA and operational data during power-off..................................................... 33
3.9.3 AssistNow Offline........................................................................................................................ 34
3.9.4 AssistNow Autonomous.............................................................................................................37
3.10 Save-on-shutdown feature...............................................................................................................41
3.11 Power management...........................................................................................................................42
3.11.1 Continuous mode.......................................................................................................................43
3.11.2 Power save mode.......................................................................................................................43
3.11.3 Peak current settings............................................................................................................... 50
3.11.4 Power on/off command............................................................................................................ 51
3.11.5 EXTINT pin control when power save mode is not active................................................. 51
3.11.6 Measurement and navigation rate with power save mode...............................................51
3.11.7 Backup modes............................................................................................................................51
3.12 Clocks and time.................................................................................................................................. 52
3.12.1 Receiver local time.................................................................................................................... 52
3.12.2 Navigation epochs..................................................................................................................... 52
3.12.3 iTOW timestamps..................................................................................................................... 53
3.12.4 GNSS times.................................................................................................................................53
3.12.5 Time validity................................................................................................................................53
3.12.6 UTC representation...................................................................................................................54
3.12.7 Leap seconds..............................................................................................................................55
3.12.8 Real-time clock...........................................................................................................................55
3.12.9 Date...............................................................................................................................................55
3.13 Timing functionality...........................................................................................................................56
3.13.1 Time pulse...................................................................................................................................56
3.13.2 Timemark.................................................................................................................................... 60
3.14 Security.................................................................................................................................................61
3.14.1 Spoofing detection / monitoring............................................................................................ 61
3.14.2 Jamming/interference detection / monitoring....................................................................62
3.14.3 GNSS receiver integrity............................................................................................................63
3.15 u-blox protocol feature descriptions.............................................................................................. 63
3.15.1 Broadcast navigation data...................................................................................................... 63
3.16 Forcing a receiver reset.....................................................................................................................67
3.17 Firmware upload................................................................................................................................. 68
4 Design..................................................................................................................................... 69
4.1 Pin assignment......................................................................................................................................69
4.2 Power supply.......................................................................................................................................... 70
4.2.1 VCC: Main supply voltage.......................................................................................................... 70
4.2.2 V_BCKP: Backup supply voltage............................................................................................... 70
4.2.3 V_USB: USB interface power supply........................................................................................ 71
4.3 NEO-M9N minimal design.................................................................................................................. 71
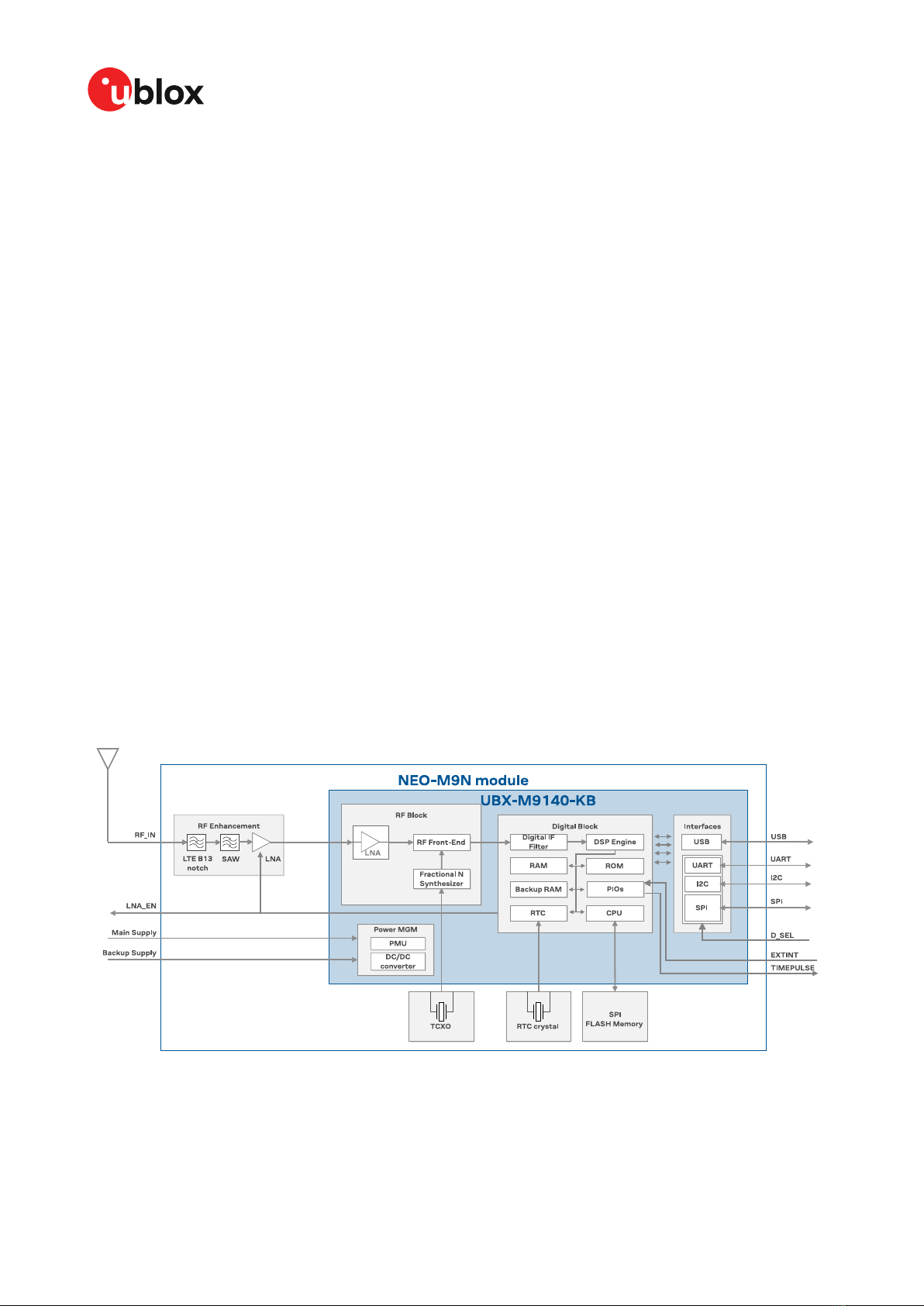
4.4 NEO-M9N internal components........................................................................................................ 72
4.4.1 Clock generation...........................................................................................................................72
4.4.2 Real-time clock (RTC)..................................................................................................................72
4.4.3 SAW and LNA............................................................................................................................... 72
4.4.4 VCC_RF antenna bias voltage...................................................................................................72
4.4.5 Flash memory............................................................................................................................... 72
4.5 Antenna...................................................................................................................................................72
4.5.1 Antenna design with passive antenna....................................................................................73
UBX-19014286 - R07
Contents Page 4 of 95
C1-Public