-19-
InstallingYT-2300Rwithbracket
YT-2300Rissuppliedwithstandardbracket.Thebracketisconsistsof2partandcan
beusedwithForkleverandNamurshaft.Thebracketisassembledinthefactoryas
basedon20mmofactuatorstemheight.Butifactuatorstemheightishigherthanthat
like30mm,50mm,reassemblethebracketadjustingtotheheight.Referringtothe
followingtable,checktheholepositions.
YT-2300RUpperbracketA
BottombracketBActuator
BracketassemblymethodbyactuatorstemheightH
Actuatorstem
height(H) Markingsofboltholes
A-L B-L A-R B-R
20mm H:20 H:20,30 H:20 H:20,30
30mm H:30 H:20,30 H:30 H:20,30
50mm H:50 H:50 H:50 H:50
Ex)IncasethatHis30mm,A-LshouldbelockedinH:30holeandB-LinH:20,30,A-R
inH:30,B-RinH:20,30withbolts.
-20-
1.Usualtypesofactuatorstemheight(H)are20,30and50mm.AftercheckingH,
assemblebracketsasexplainedonthepreviouspage.Thebracketissetas20mmtype
inthefactory. Actuatorstem
Actuator
Actuatorstemheight(H=20mm)
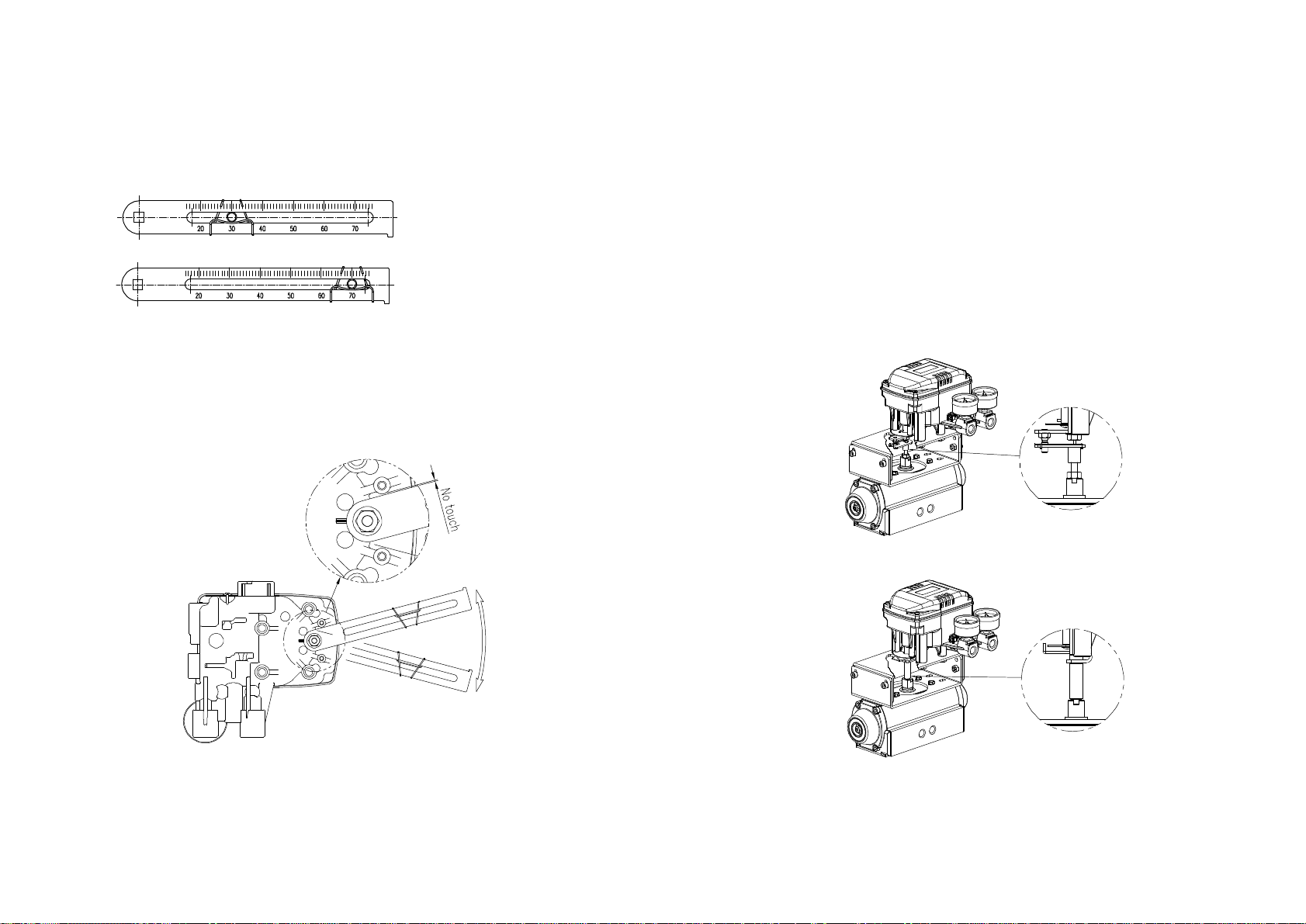
2.Attachbrackettotheactuatorusinghexagonheadboltsorwrenchbolts.Diameterof
bracketboltholesis6mm.Usespringwashersoranyotherequipmentsoasthebolts
nottobeloosenedbyvibrationorimpact.Thedirectionofbracketisdifferentby
operatingconditions,butnormaldirectionisasfollowingpicture.Thatis,whenthepiping
ofactuatorandYT-2300RisdirectionA,bracketholeandindicatorattachedonthe
bottomofYT-2300Rmainshaftshouldbesamedirectionasbeinghalfcircle.
DirectionA
Attachmentdirectionofbracketandactuator
3.Setrotationpositionofactuatorstemasinitialzeropointwhichisstroke0%.Incase
ofspringreturntypesingleactuator,sincetheactuatorstemisalwaysrotatedatzero
pointwithoutsupplypressure,itiseasytocheckzeropoint.Iftheactuatorisdouble
acting,checkthatwhetheritisclockwiseorcounterclockwiseortherotationdirectionof
actuatorstemwithusingsupplypressure.
4.Setactuatorstemasinitialzeropointandinstallforkleverasthefollowingpicture.
Ensurethepositionofinitialzeropointwhenactuatorstemisclockwiseorcounter
clockwise.Installationangleofforklevershouldbeabout45degreebasedonthelinear
shaft.ButtheangleisnotrelatedtoNamurshaft.