Safety
—
—
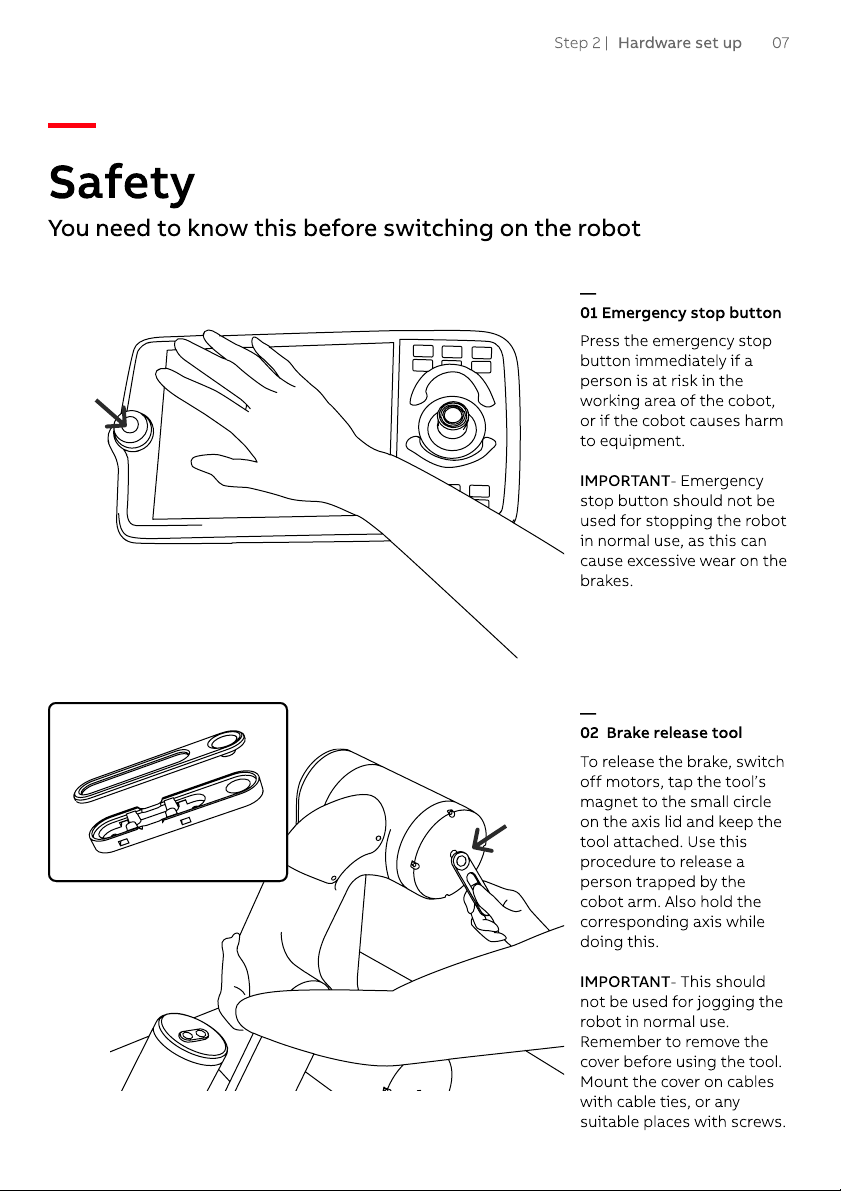
01 Emergency stop button
Press the emergency stop
button immediately if a
person is at risk in the
working area of the cobot,
or if the cobot causes harm
to equipment.
I PORTANT- Emergency
stop button should not be
used for stopping the robot
in normal use, as this can
cause excessive wear on the
brakes.
—
02 Brake release tool
To release the brake, switch
off motors, tap the tool’s
magnet to the small circle
on the axis lid and keep the
tool attached. Use this
procedure to release a
person trapped by the
cobot arm. Also hold the
corresponding axis while
doing this
I PORTANT- This should
not be used for jogging the
robot in normal use.
Remember to remove the
cover before using the tool.
Mount the cover on cables
with cable ties, or any
suitable places with screws.
07Step 2 | Hardware set up
You need to know this before switching on the robot