Contents
1 OVERVIEW..................................................................................................................................... 4
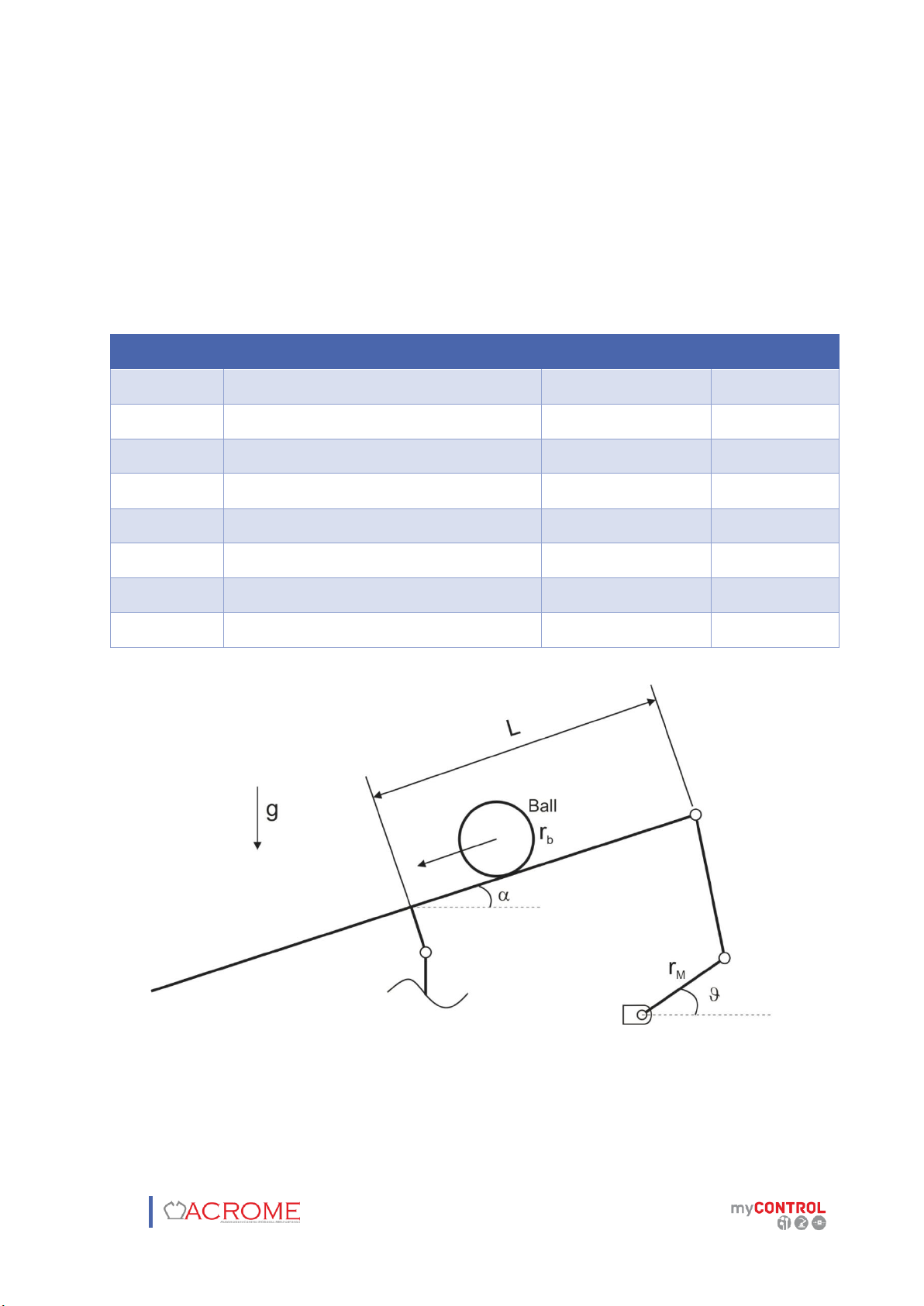
1.1 System Description................................................................................................................. 4
2 COMPONENTS............................................................................................................................... 5
2.1 RC Servo Motor (# 1).............................................................................................................. 6
2.2 NI myRIO (# 3) ........................................................................................................................ 6
2.3 ACROME Power Distribution Box (# 4).................................................................................. 7
3 TECHNICAL SPECIFICATIONS......................................................................................................... 8
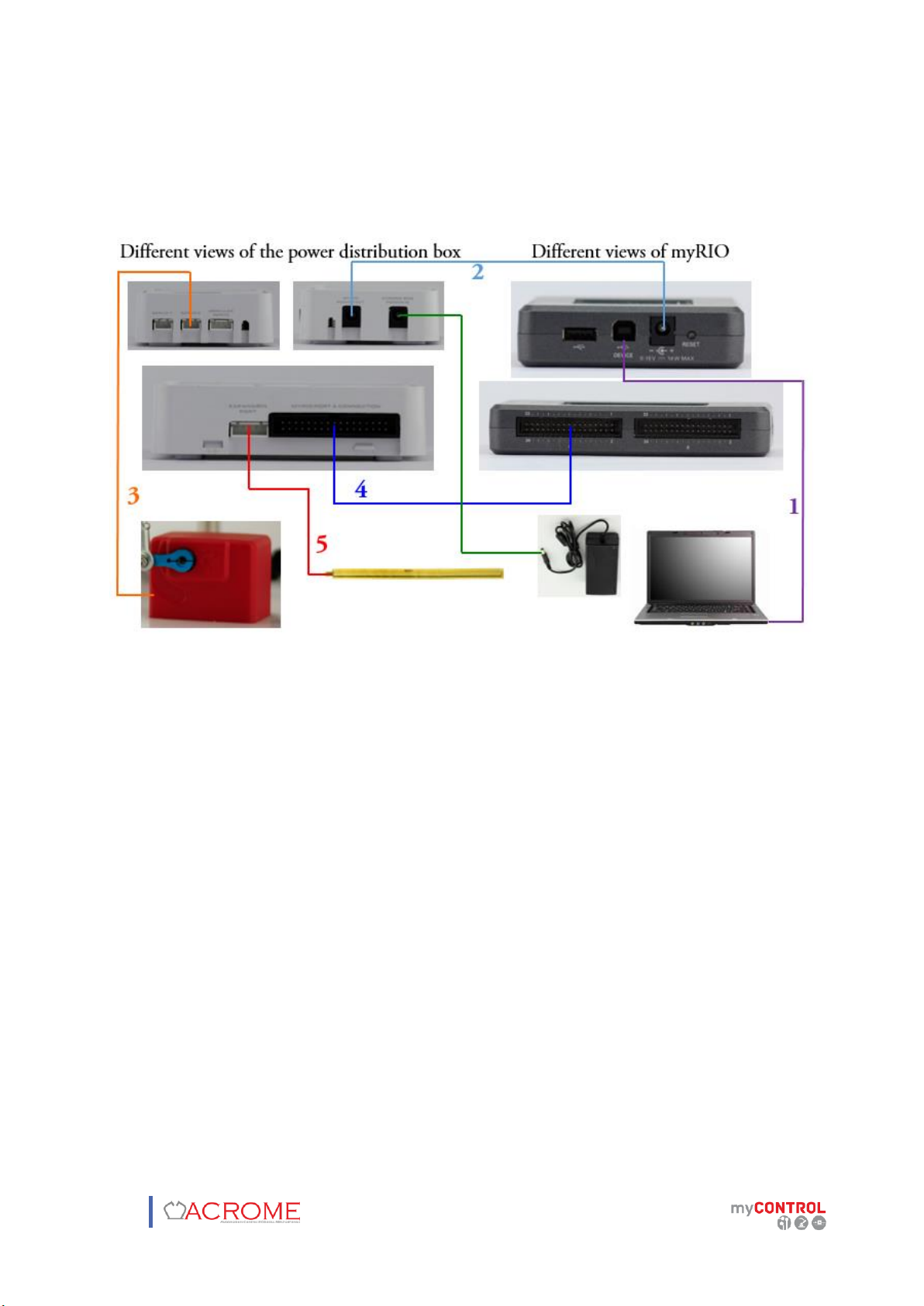
4 WIRING.......................................................................................................................................... 9
4.1 Cable Names........................................................................................................................... 9
4.2 Connections.......................................................................................................................... 10
5 SETTING UP THE SYSTEM............................................................................................................ 11
5.1 MyRIO Preparation on NI MAX ............................................................................................ 11
5.1.1 Firmware Update .................................................................................................... 11
5.1.2 Software Update ..................................................................................................... 13
5.2 Installing Software Program via VI Package Manager (VIPM)............................................. 17
5.3 Getting Started..................................................................................................................... 20
5.4 Calibration............................................................................................................................ 21
6 TROUBLESHOOTING.................................................................................................................... 29
6.1 Connection Open FPGA VI Reference.................................................................................. 29