Manual, Flexdeburr, RC‑660 Series
Document #9610‑50‑1017‑10
Pinnacle Park • 1031 Goodworth Drive •Apex, NC 27539 USA• Tel: +1.919.772.0115 • Fax: +1.919.772.8259 • www.ati‑ia.com
3
Table of Contents
Foreword.......................................................................................................................................... 2
Glossary........................................................................................................................................... 5
1. Safety......................................................................................................................................... 6
1.1 ExplanationofNotications.........................................................................................................6
1.2 General Safety Guidelines............................................................................................................6
1.3 Safety Precautions........................................................................................................................7
2. Product Overview..................................................................................................................... 8
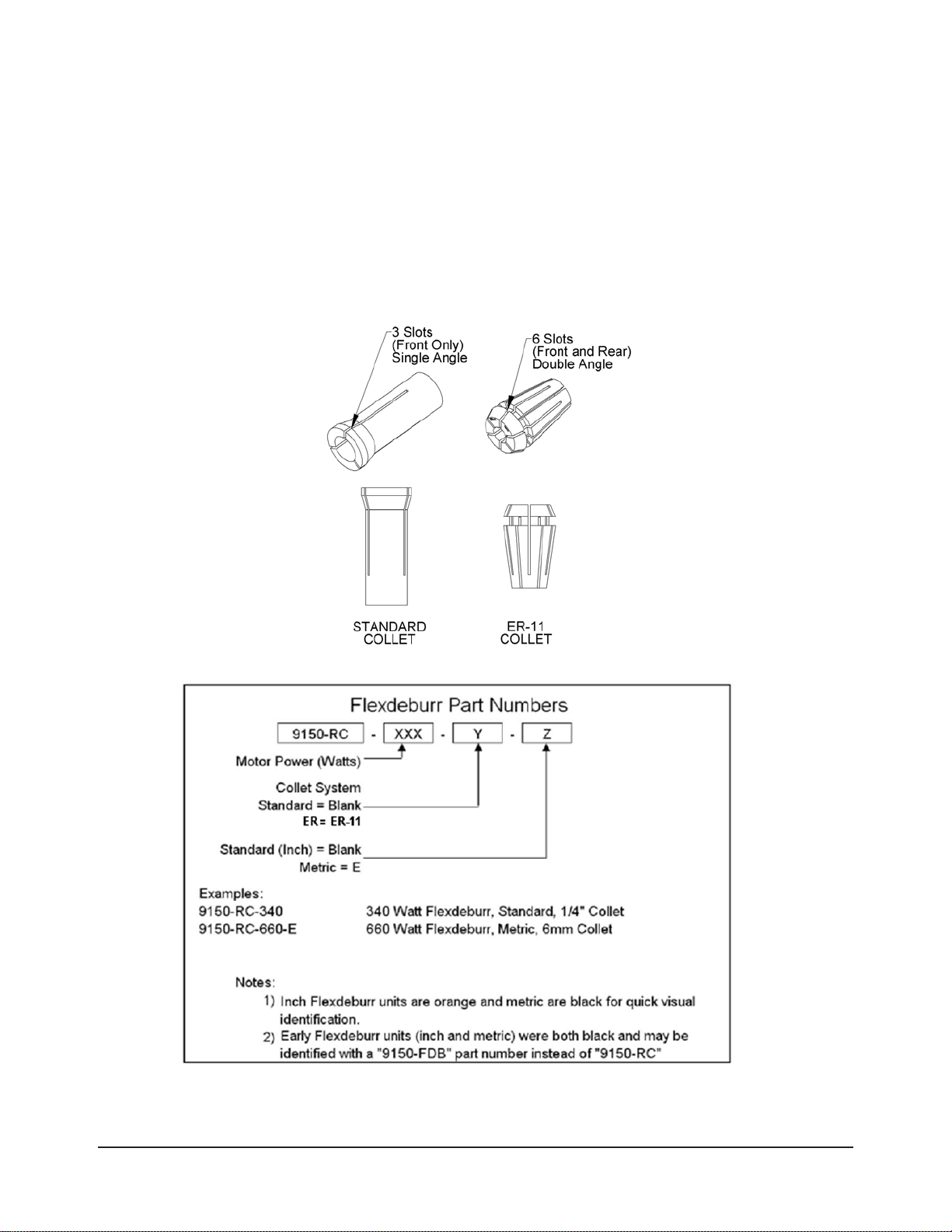
2.1 Tool Collet Systems ......................................................................................................................8
2.2 Deburring Tool Part Numbers ......................................................................................................9
2.3 Technical description..................................................................................................................10
2.3.1 Environmental Limitations................................................................................................10
2.3.1.1 Operation..........................................................................................................10
2.3.1.2 Storage.............................................................................................................10
2.3.2 Compliance Unit Performance .........................................................................................10
3. Installation .............................................................................................................................. 12
3.1 Transportation and Protection During Transportation............................................................12
3.2 Inspection of Condition When Delivered..................................................................................12
3.3 Unpacking and Handling............................................................................................................12
3.4 Storage and Preventive Maintenance during Storage.............................................................12
3.5 Side Mounting Installation..........................................................................................................13
3.6 Axial Mounting Installation.........................................................................................................14
3.7 Pneumatics..................................................................................................................................15
4. Operation ................................................................................................................................ 17
4.1 Safety Precautions......................................................................................................................17
4.2.1 Air Quality.........................................................................................................................18
4.2.2 No Lubrication..................................................................................................................18
4.2.3 Bur Selection, Design, and Maintenance.........................................................................18
4.2.4 Deburring Tool Approach Path Should be Slow and at an Angle .....................................18
4.2.5 No Axial Loading ..............................................................................................................18
4.2.6 Program the Robot to Incorporate 50% Compliance Travel of the Tool ...........................18
4.2 Normal Operation........................................................................................................................18
4.3 Flexdeburr Working Environment .............................................................................................19
4.4 Tool Center Point (TCP) Position and Programming...............................................................19
4.5 Cutter Operation and Bur Selection..........................................................................................21
4.5.1 Bur Selection....................................................................................................................21