UMAX0608XX‐1000.Tri‐AxialJ1939CANInclinometer.Version9B iii
TABLE OF CONTENTS
1INTRODUCTION ................................................................................................................. 5
2INCLINOMETER DESCRIPTION ........................................................................................ 6
2.1Theory of Operation ..................................................................................................... 6
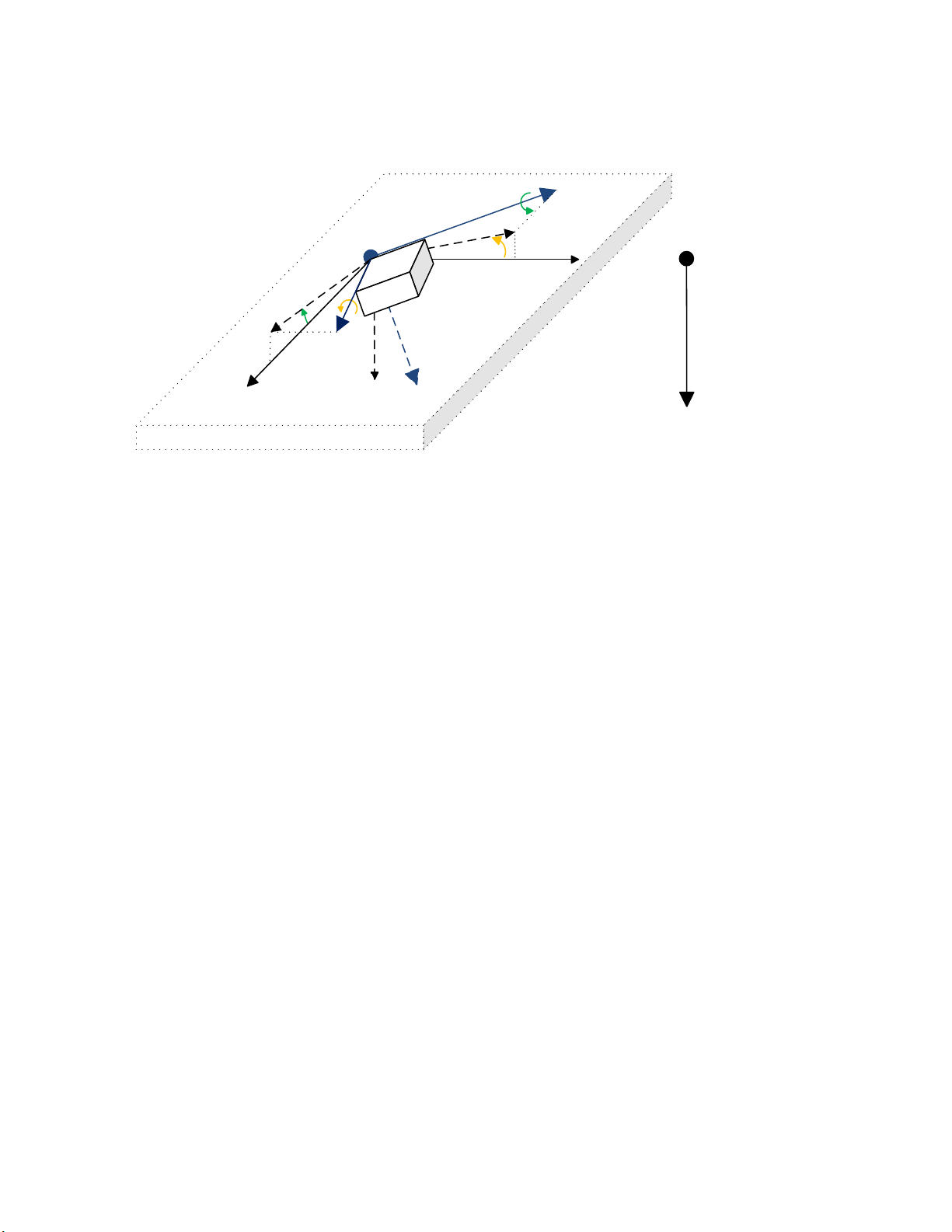
2.1.1Unit Coordinate System ........................................................................................ 6
2.1.2Unit Reference Frames ......................................................................................... 6
2.1.3Angle measurements ............................................................................................ 7
2.1.3.1Tilt Angles ......................................................................................................... 8
2.1.3.2Rotation Angles ................................................................................................. 9
2.1.3.2.1Unit Rotation Angles ................................................................................. 10
2.1.3.2.2Euler Angles ............................................................................................. 11
2.1.3.2.3Gimbal Lock .............................................................................................. 12
2.1.3.3Maximum Gravity Acceleration Error ............................................................... 13
2.1.3.4Practical Recommendations ............................................................................ 13
2.1.3.5Default Settings ............................................................................................... 15
2.2Hardware Block Diagram ........................................................................................... 16
2.3Software Organization ............................................................................................... 16
2.4CAN Interface ............................................................................................................ 17
2.4.1CAN Baud Rate .................................................................................................. 18
2.4.2J1939 Name and Address .................................................................................. 18
2.4.3Slew Rate Control ............................................................................................... 19
2.4.4Network Bus Terminating Resistors .................................................................... 19
2.5Default Settings .......................................................................................................... 19
2.5.1CAN Interface ..................................................................................................... 19
2.5.1.1PGN 61459, Slope Sensor Information, SSI ................................................... 19
2.5.1.2PGN 61481, Slope Sensor Information 2, SSI2 .............................................. 21
2.5.1.3PGN 65256, Vehicle Direction/Speed, VDS .................................................... 22
2.5.1.4PGN 64905, Vehicle Direction/Speed 2, VDS2 ............................................... 23
2.5.2Analog Outputs ................................................................................................... 24
3INCLINOMETER LOGICAL STRUCTURE ....................................................................... 25
3.1Function Block Signals ............................................................................................... 26
3.1.1Undefined Signal ................................................................................................ 26
3.1.2Discrete Signal .................................................................................................... 26
3.1.3Continuous Signal ............................................................................................... 26
3.1.4Signal Type Conversion ...................................................................................... 27
3.1.4.1Discrete to Continuous Conversion ................................................................. 27
3.1.4.2Continuous to Discrete Conversion ................................................................. 27
3.1.4.3Undefined Signal Conversion .......................................................................... 27
3.2Accelerometer ............................................................................................................ 27
3.3Angle Measurement ................................................................................................... 28
3.4Unit Installation .......................................................................................................... 29
3.4.1.1Unit Frame Orientation Examples ................................................................... 30
3.5Sensor Calibration ..................................................................................................... 32
3.6Binary Functions ........................................................................................................ 32
3.7Analog Signal Outputs ............................................................................................... 34
3.8Global Parameters ..................................................................................................... 36
3.9J1939 Network ........................................................................................................... 36
3.9.1ECU Network Parameters ................................................................................... 37