Table of contents
TX1200 3Version: 1.1
Table of contents
1 Foreword....................................................................................................................................................5
1.1 Notes on the documentation .............................................................................................................5
1.2 Safety instructions.............................................................................................................................6
1.3 Notes on information security............................................................................................................7
2 Introduction ...............................................................................................................................................8
3 Target groups ............................................................................................................................................9
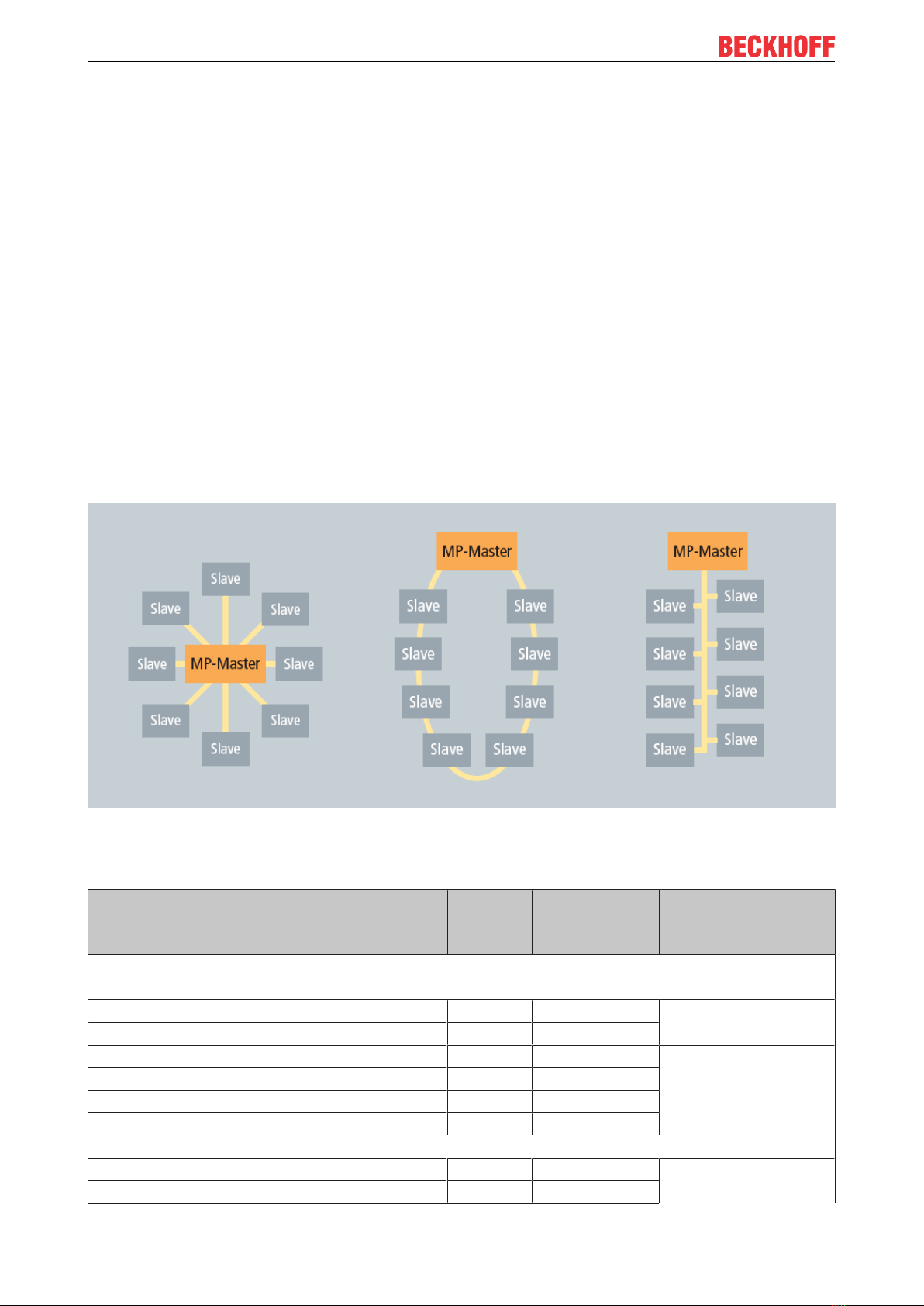
4 MP-Bus.....................................................................................................................................................10
4.1 Topology .........................................................................................................................................10
4.2 Actuator solutions for MP-Bus.........................................................................................................10
5 Integration into TwinCAT........................................................................................................................14
5.1 KL6771 - Linking to the TwinCAT System Manager .......................................................................14
5.2 Integration in TwinCAT (CX9020) ...................................................................................................16
5.3 Integration into TwinCAT (BC9191) ................................................................................................18
6 Programming...........................................................................................................................................22
6.1 General Information ........................................................................................................................24
6.2 Function blocks ...............................................................................................................................24
6.2.1 KL6771............................................................................................................................. 25
6.2.2 MP_Addressing................................................................................................................ 26
6.2.3 MP_CMV.......................................................................................................................... 28
6.2.4 MP_DamperLinearActuator.............................................................................................. 30
6.2.5 MP_EnergyValveV4_Configuration.................................................................................. 31
6.2.6 MP_EnergyValveV4_Process .......................................................................................... 34
6.2.7 MP_EPIV.......................................................................................................................... 36
6.2.8 MP_EPIV_R6 ...................................................................................................................38
6.2.9 MP_EPIV_R6_Parameter ................................................................................................39
6.2.10 MP_EV .............................................................................................................................41
6.2.11 MP_EV_Parameter ..........................................................................................................43
6.2.12 MP_MPX ..........................................................................................................................44
6.2.13 MP_PTH........................................................................................................................... 45
6.2.14 MP_RoomSensor............................................................................................................. 47
6.2.15 MP_RoomSensor_Parameter ..........................................................................................48
6.2.16 MP_Smoker .....................................................................................................................49
6.2.17 MP_TEM_Configuration................................................................................................... 51
6.2.18 MP_TEM_Process ...........................................................................................................52
6.2.19 MP_UST_3....................................................................................................................... 53
6.2.20 MP_VAV........................................................................................................................... 56
6.2.21 MP_VRU_Configuration................................................................................................... 58
6.2.22 MP_VRU_Process ...........................................................................................................59
6.2.23 MP_Window .....................................................................................................................61
6.2.24 MPL_DamperLinearActuator............................................................................................ 62
6.3 Functions.........................................................................................................................................63
6.3.1 NI1000_LuS_TO_INT : INT.............................................................................................. 63
6.3.2 NI1000_TO_INT : INT ...................................................................................................... 64