Page3 ©Benewake · All rights reserved · Subject to change without notice · 2021-12-06
TABLE OF CONTENTS
1INTRODUCTION...................................................................................................................................... 4
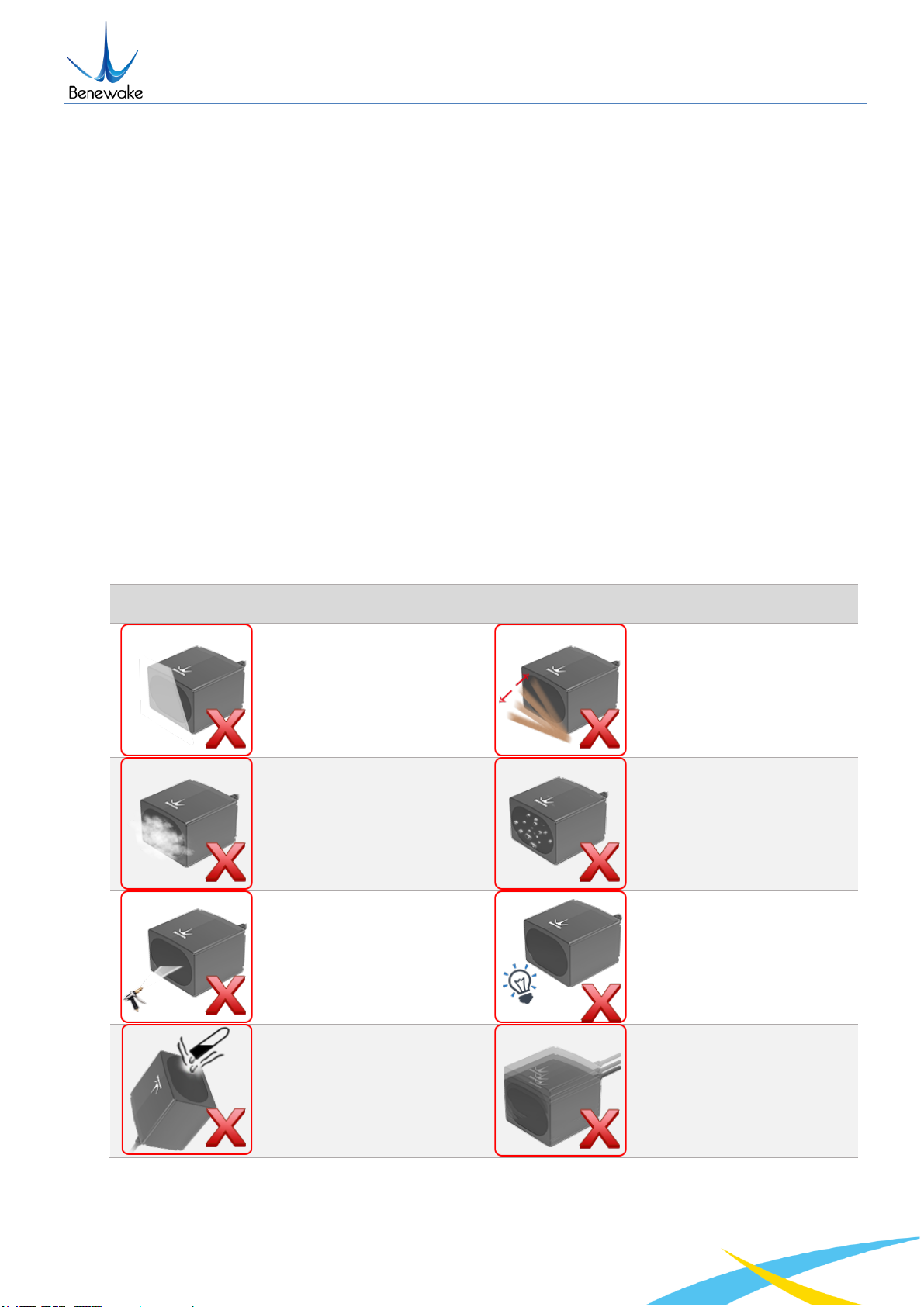
1.1 FAILURE SCENARIOS ................................................................................................................................. 4
1.2 SYMBOLS AND DOCUMENT CONVENTIONS .................................................................................................... 5
2PRODUCT DESCRIPTION ......................................................................................................................... 6
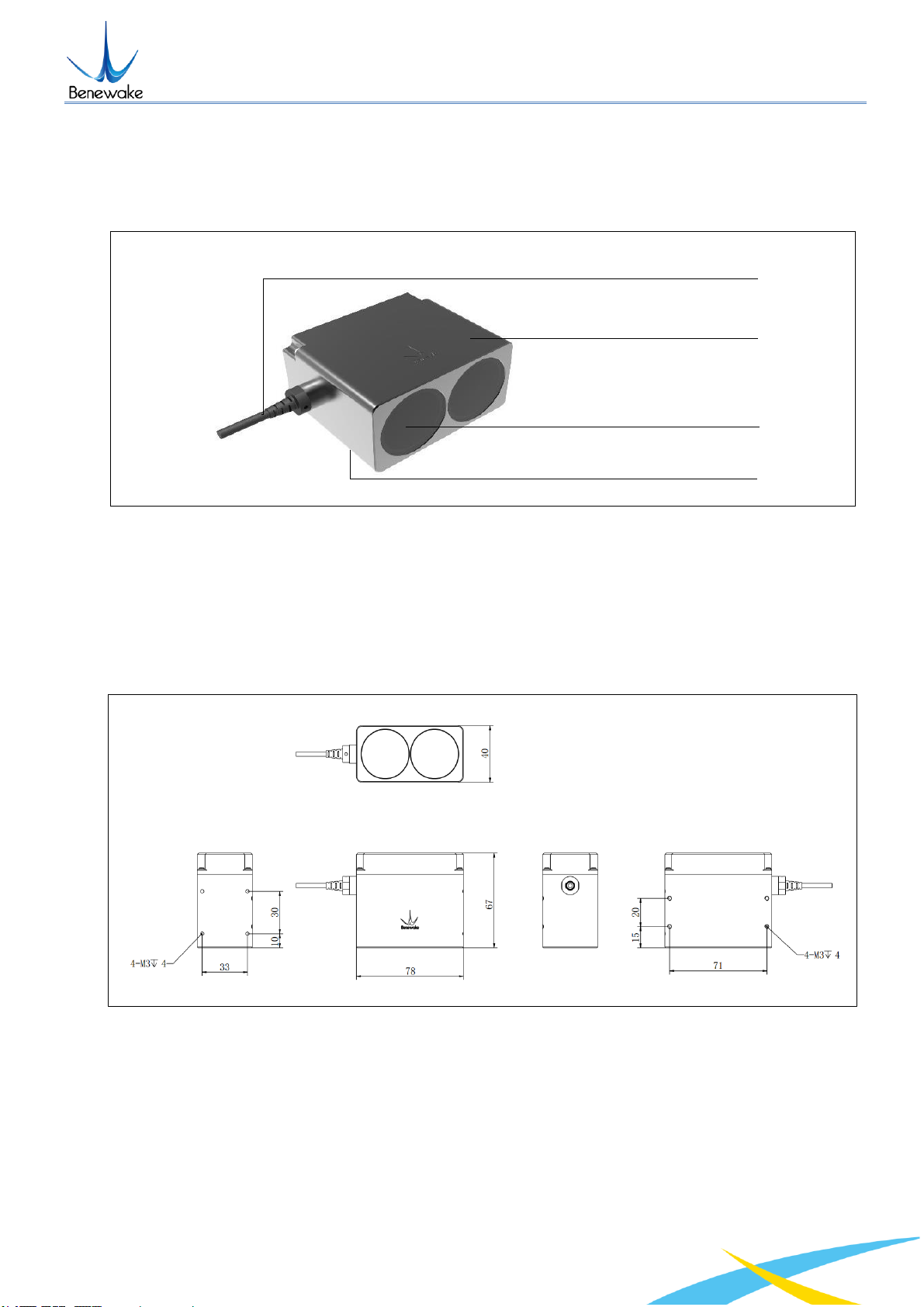
2.1 APPEARANCE OVERVIEW ........................................................................................................................... 6
2.2 DIMENSIONAL DRAWING........................................................................................................................... 6
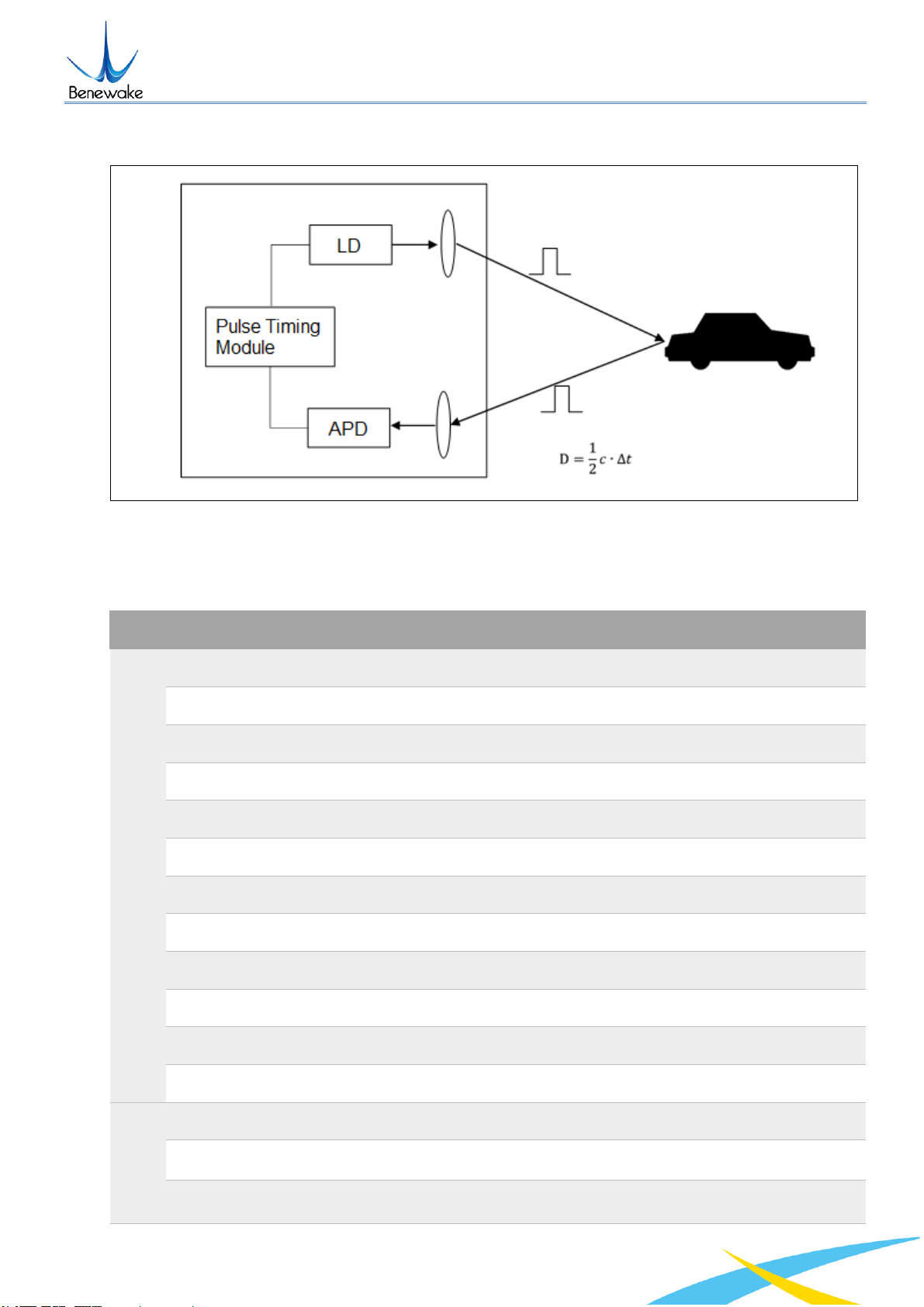
2.3 MEASURING PRINCIPLE ............................................................................................................................. 6
2.4 TECHNICAL SPECIFICATION ......................................................................................................................... 7
2.5 FOV...................................................................................................................................................... 8
3ELECTRICAL INSTALLATION ................................................................................................................... 10
3.1 PIN AND WIRE COLOR ASSIGNMENT........................................................................................................... 10
3.2 WIRE CROSS-SECTIONS ........................................................................................................................... 10
3.3 WIRING UART INTERFACE....................................................................................................................... 11
3.4 WIRING CAN INTERFACE......................................................................................................................... 11
3.5 CAN BUS ............................................................................................................................................. 11
4PROTOCOLS.......................................................................................................................................... 13
4.1 COMMUNICATION PROTOCOL OF UART..................................................................................................... 13
4.2 USER PROTOCOL: UART ......................................................................................................................... 13
4.3 COMMUNICATION PROTOCOL OF CAN....................................................................................................... 14
4.4 USER PROTOCOL: CAN........................................................................................................................... 14
5CUSTOM CONFIGURATION ................................................................................................................... 14
5.1 PROTOCOL DESCRIPTION ......................................................................................................................... 14
5.2 COMMON COMMANDS........................................................................................................................... 15
5.3 COMMAND EDITING............................................................................................................................... 17
6OPTIONAL ACCESSORIES ...................................................................................................................... 17
6.1 SELF-CLEANING MODULE......................................................................................................................... 17
6.2 AIMING BEAM MODULE .......................................................................................................................... 19
6.3 EXTENSION CORD................................................................................................................................... 20
7QUICK START GUIDE ............................................................................................................................. 21
7.1 CONNECTION AND BASIC TEST .................................................................................................................. 21
7.2 TROUBLESHOOTING GUIDE FOR INITIAL TEST................................................................................................ 22
7.3 WORKING MODE ................................................................................................................................... 23
7.4 INFLUENCES OF OBJECT SURFACES ON THE MEASUREMENT.............................................................................. 23
8TROUBLESHOOTING ............................................................................................................................. 26
ATTACHMENT 1: REFLECTIVITY OF DIFFERENT MATERIALS......................................................................... 28