Page4
Catalog
1ATTENTIONS .......................................................................................................................................6
1.1 ABOUT THIS DOCUMENT ........................................................................................................................6
1.2 USAGE OF PRODUCT..............................................................................................................................6
1.3 CONDITIONS WITH POTENTIAL PRODUCT FAILURE ........................................................................................6
2PRODUCT INTRODUCTION...................................................................................................................7
2.1 APPEARANCE OVERVIEW........................................................................................................................7
2.2 PRODUCT STRUCTURE ...........................................................................................................................7
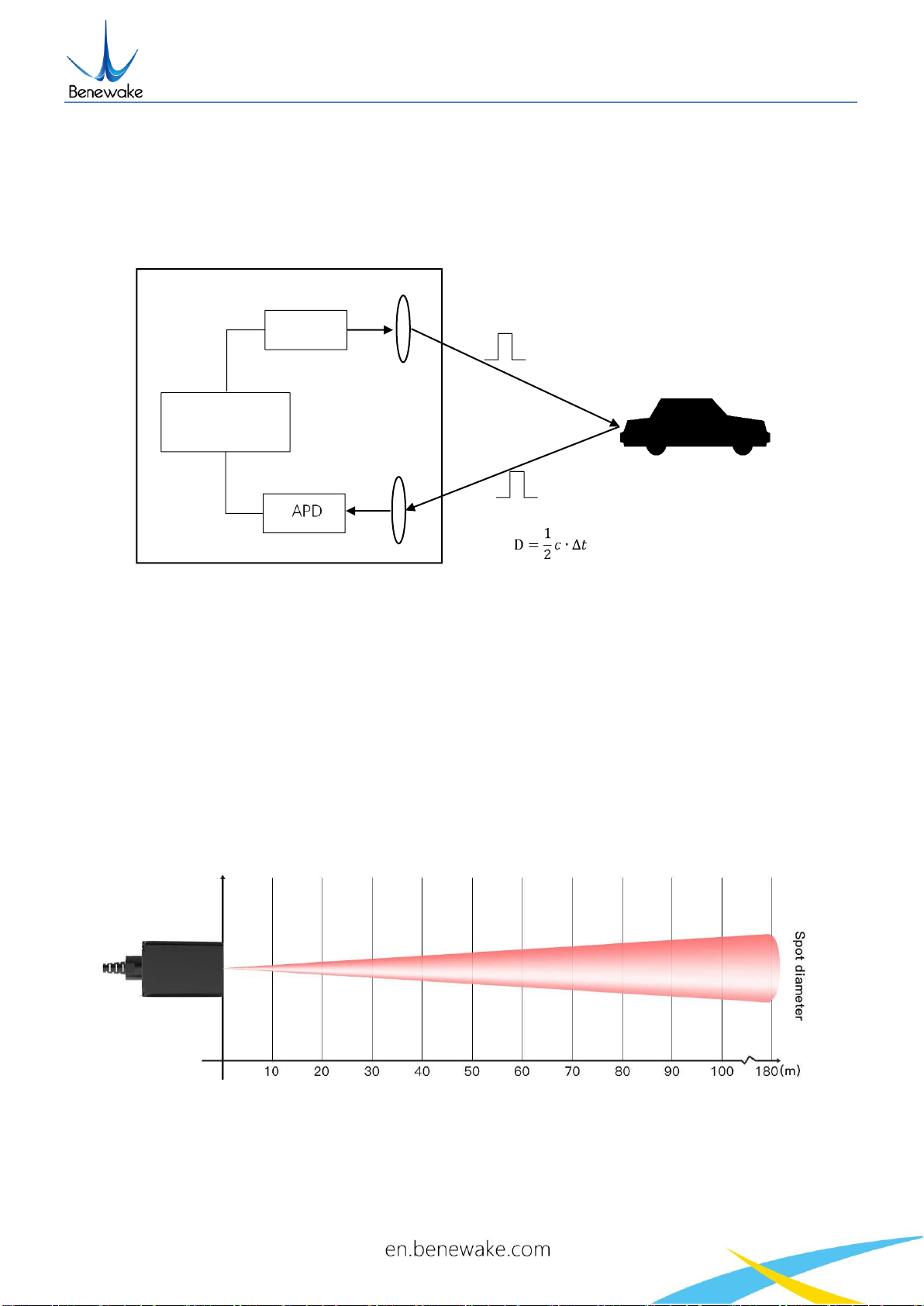
2.3 PRINCIPLE OF MEASUREMENT .................................................................................................................7
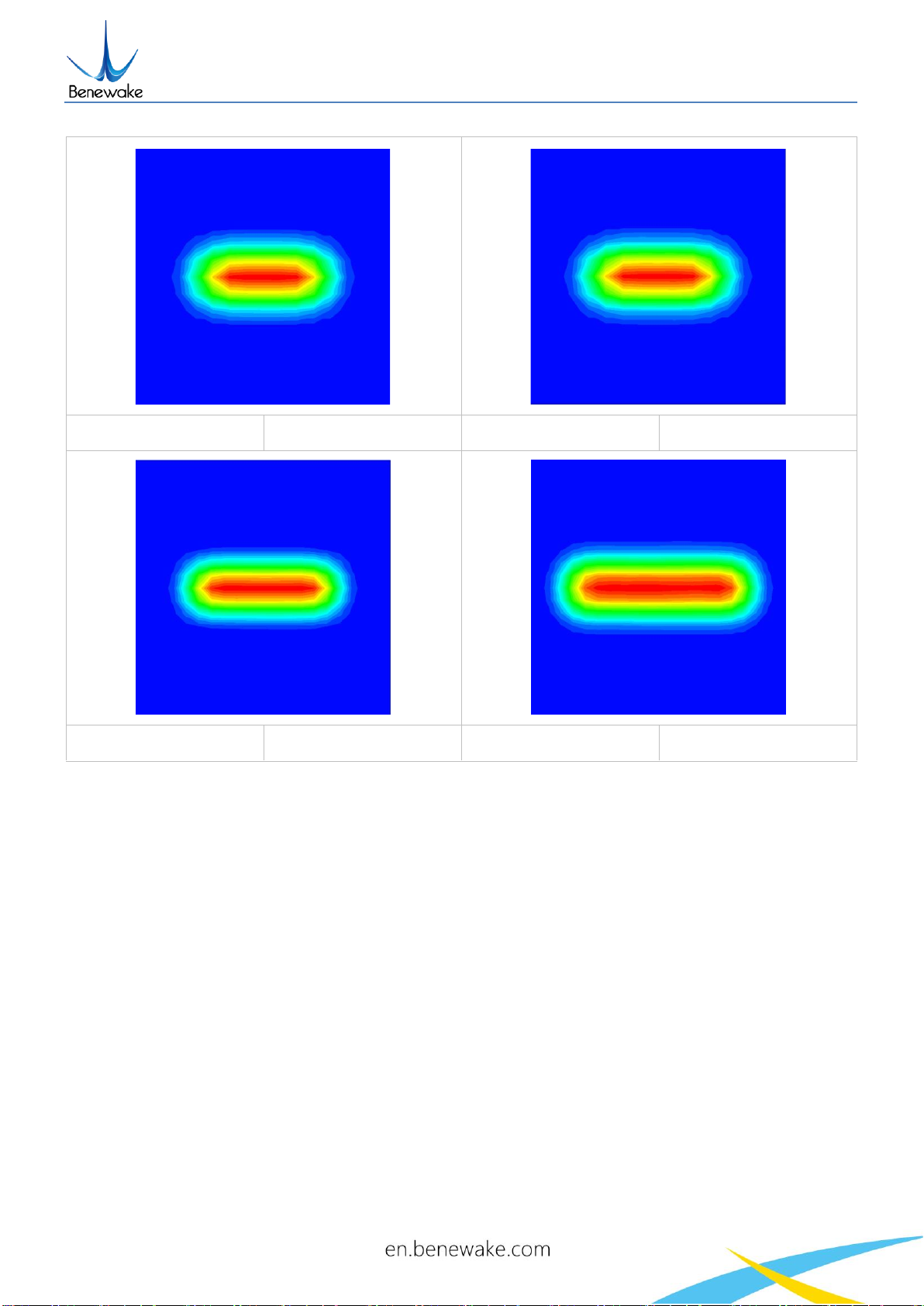
2.4 DETECTION ANGLE DESCRIPTIONS .............................................................................................................8
3PHYSICAL INTERFACE...........................................................................................................................9
3.1 DESCRIPTION OF LINE SEQUENCE AND CONNECTION ......................................................................................9
3.2 ELECTRICAL CHARACTERISTICS................................................................................................................10
4COMMUNICATION INTERFACE AND DATA FORMAT.............................................................................11
4.1 UART INTERFACE ...............................................................................................................................11
4.2 CAN BUS ........................................................................................................................................12
4.3 DESCRIPTIONS ON PARAMETER CONFIGURATION.........................................................................................13
4.3.1 FUNCTION OVERVIEW ..................................................................................................................................13
4.3.2 COMMANDS...............................................................................................................................................13
4.3.3 INSTRUCTIONS OF COMMAND EDITING ............................................................................................................15
5QUICK TEST PROCEDURE ...................................................................................................................15
5.1 REQUIRED TOOLS OF PRODUCT TEST .......................................................................................................15
5.2 TEST PROCEDURE................................................................................................................................16