PREFACE
Dear users:
Thank you for choosing Benewake products. In the purpose of offering better operation
experience to you, we hereby write this manual for an easier and simpler operation of
our product, hoping to better solve the common problems you may meet.
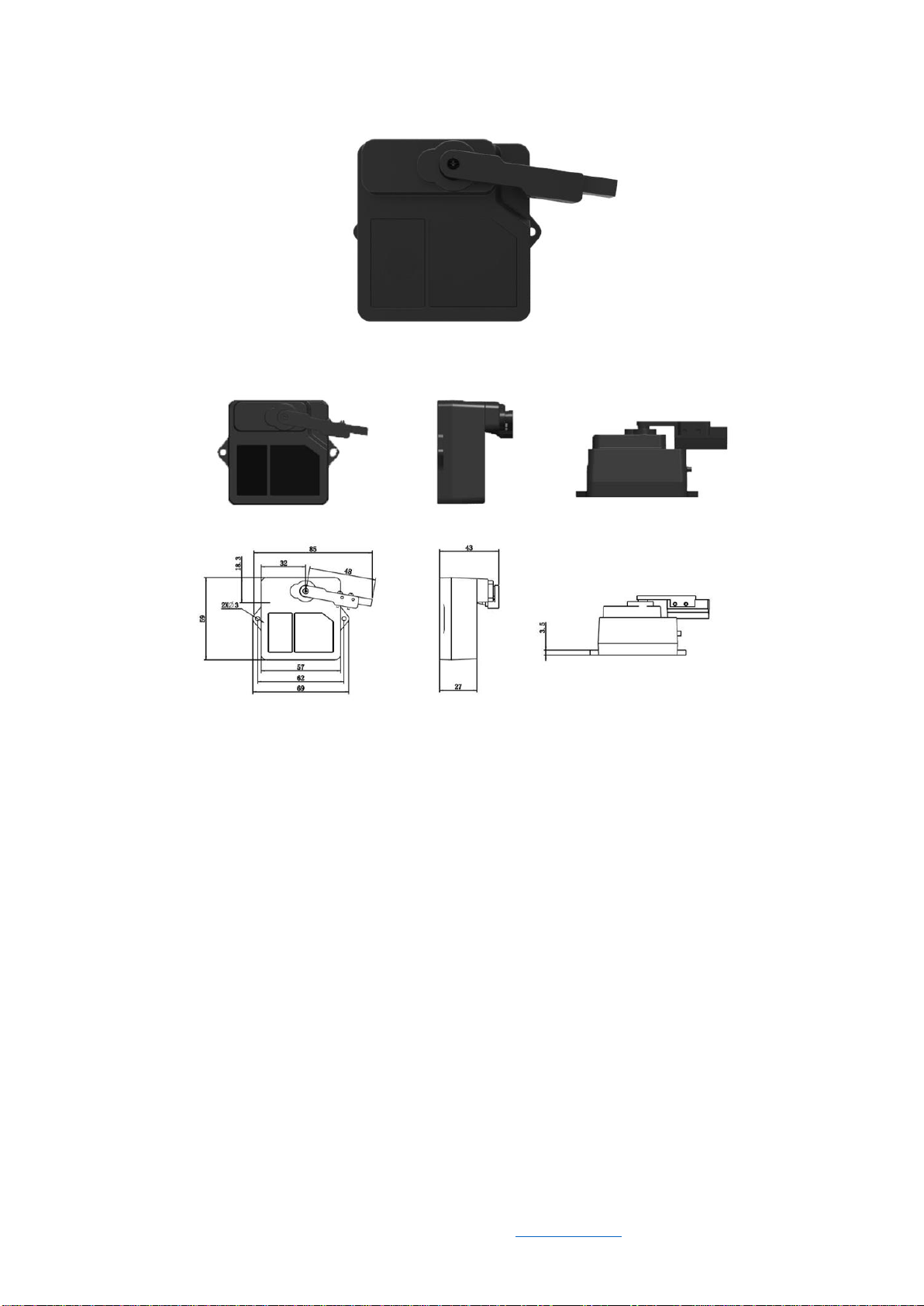
This user manual contains relevant information on product introduction, usage and
maintenance of TF02-Pro-W-485, covers the product operation introduction and
common problem solutions. Please read this manual carefully before using the product.
Remember the precautions to avoid hazards, and please follow the described steps in
the manual when using it.
If you have any problems in the process of using, you are welcome to contact Benewake
at any time for help.
Contact details
Official website: en.benewake.com
TEL:+86-10- 57456983
Headquarters Address
Benewake (Beijing) Co., Ltd.
No.3030, 3rd Floor, Independent Innovation Building, No.6 Chuangye Road, Haidian
District, Beijing, China
Copyright Statement
This User Manual is copyright © of Benewake. Please do not modify, delete or
translate the description of this manual contents without the official written
permission from Benewake.
Disclaimer
As our products are constantly improving and updating, the specifications of TF02-Pro-
W-485 are subject to change. Please refer to the official website for latest version.