TABLE OF CONTENTS
MM200 MOTOR MANAGEMENT SYSTEM – QUICKSTART GUIDE toc–1
Table of Contents
Overview ..........................................................................................................................1
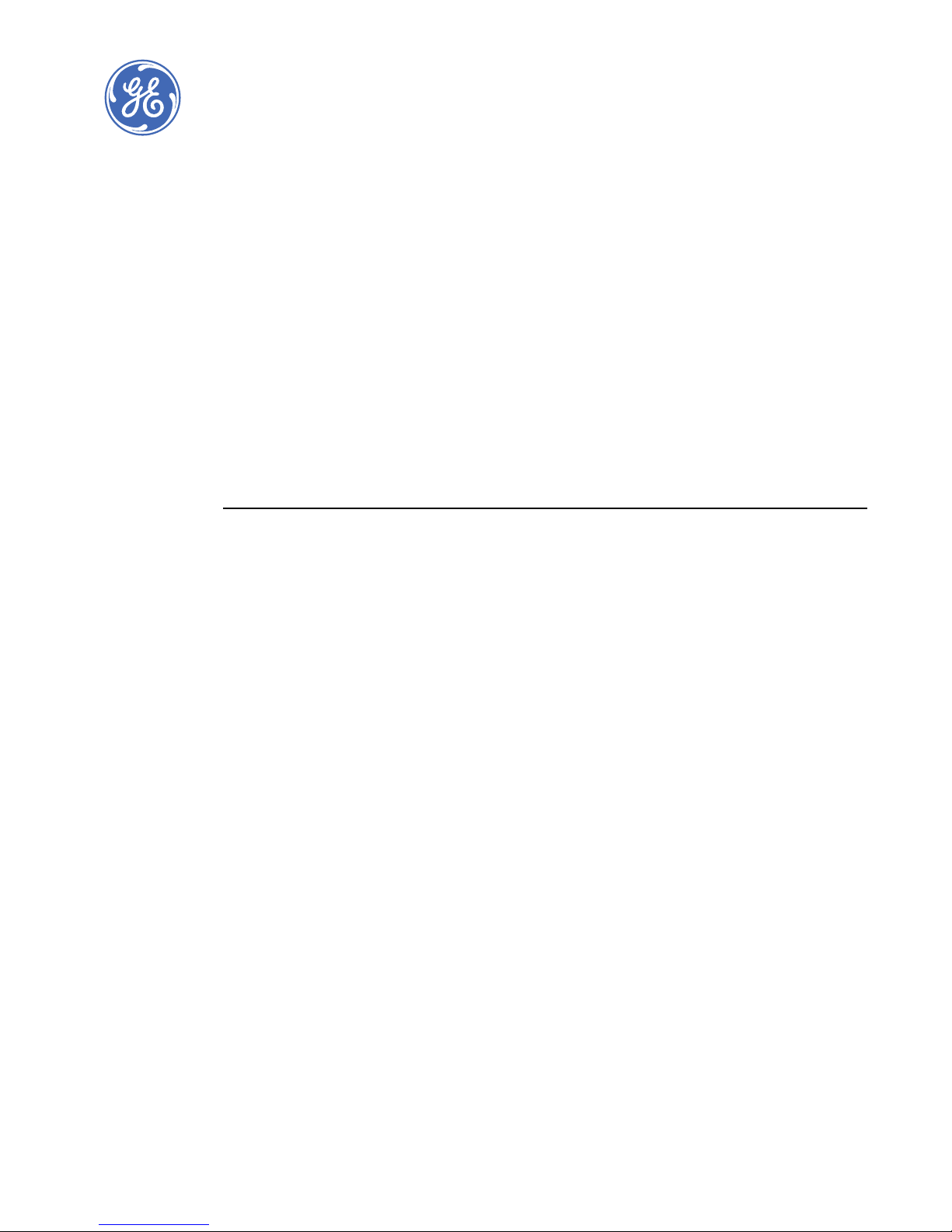
Mechanical installation..................................................................................................................................2
Dimensions ......................................................................................................................................................... 2
Product identification..................................................................................................................................... 3
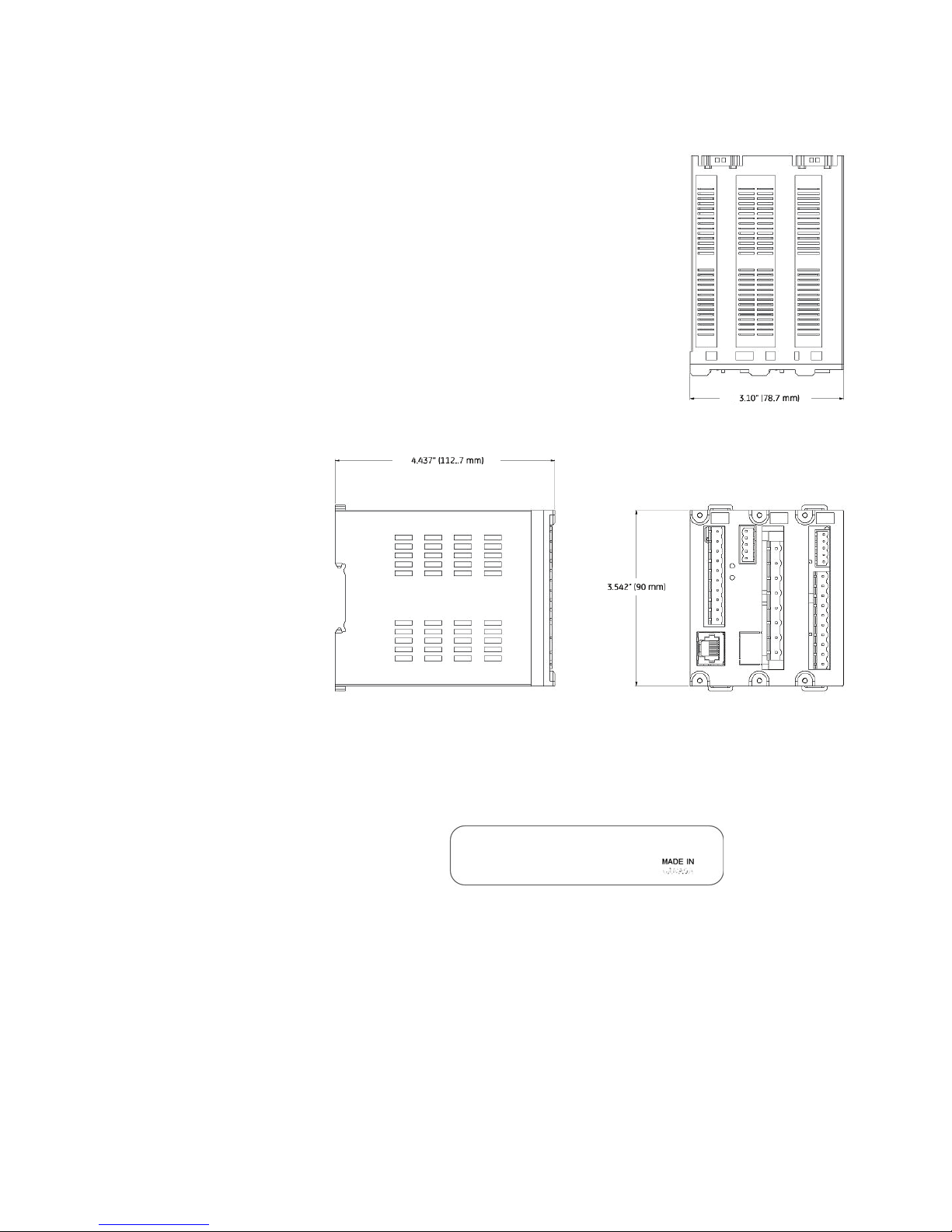
Mounting.............................................................................................................................................................. 4
Electrical installation.......................................................................................................................................5
Full-voltage non-reversing starter........................................................................................................... 9
RS485 connections .......................................................................................................................................10
Control panel...................................................................................................................................................11
Basic control panel .......................................................................................................................................11
Setpoints ........................................................................................................................13
Understanding setpoints ........................................................................................................................... 13
Configuration setpoints..............................................................................................................................13
Motor setpoints...............................................................................................................................................13
Common motor setpoints..........................................................................................................................13
Current transformers ...................................................................................................................................15
Protection elements.....................................................................................................16
Thermal protection....................................................................................................................................... 16
Overload curve................................................................................................................................................16
Communications interfaces .......................................................................................19
Specifications................................................................................................................20
Protection specifications ...........................................................................................................................20
Inputs specifications .................................................................................................................................... 21
Outputs specifications ................................................................................................................................22
Power supply specifications.....................................................................................................................22
Communications specifications.............................................................................................................22
Testing and certification ............................................................................................................................23
Physical specifications................................................................................................................................23
Environmental specifications .................................................................................................................. 24
MM200 order codes......................................................................................................25
Example of an MM200 order code........................................................................................................25
INDEX
SUMMARY OF CERTIFICATION