SMRI5
Manuale d’uso
SMRI5
Descrizione
Il presente manuale ha lo scopo di descrivere
l'encoder bearingless SMRI5. Questi trasduttori di
posizione sono progettati per realizzare sistemi di
misura su macchine automatiche e automazioni in
genere. Il sistema è composto da un anello
magnetizzato, un'elettronica di conversione e un
sensore che, in lettura senza contatto sull'anello,
restituisce in uscita un segnale a onda quadra
equivalente a quello di un encoder o una riga ottica
incrementale. a banda è magnetizzata con campi
magnetici alternati nord/sud, la dimensione del polo
-5mm- rappresenta il passo di magnetizzazione P (si
veda a pagina 5). E' necessario abbinare il sensore
agli anelli MRI con “passo 5”.
Elenco sezioni
1 - Norme di sicurezza
2 - Identificazione
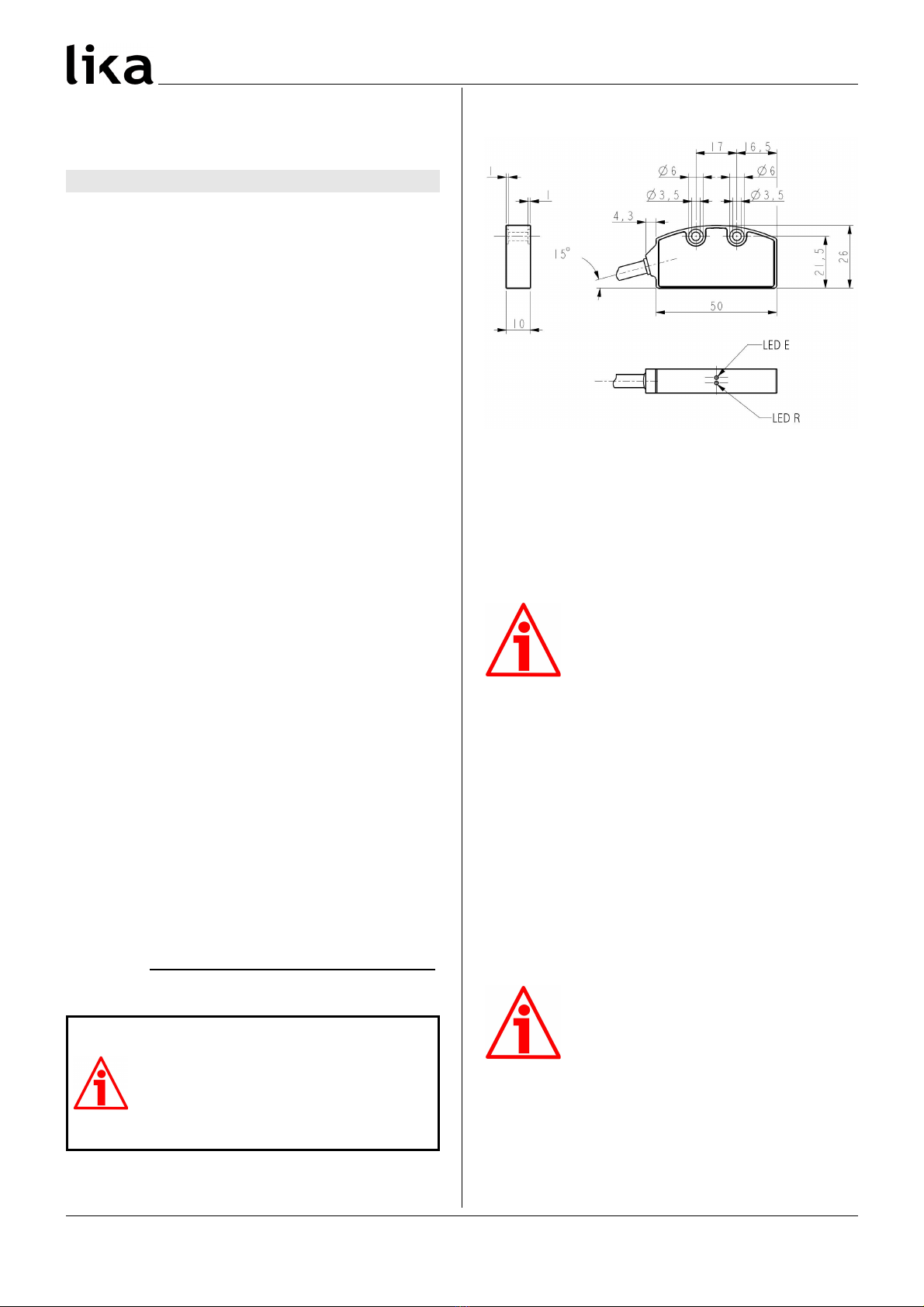
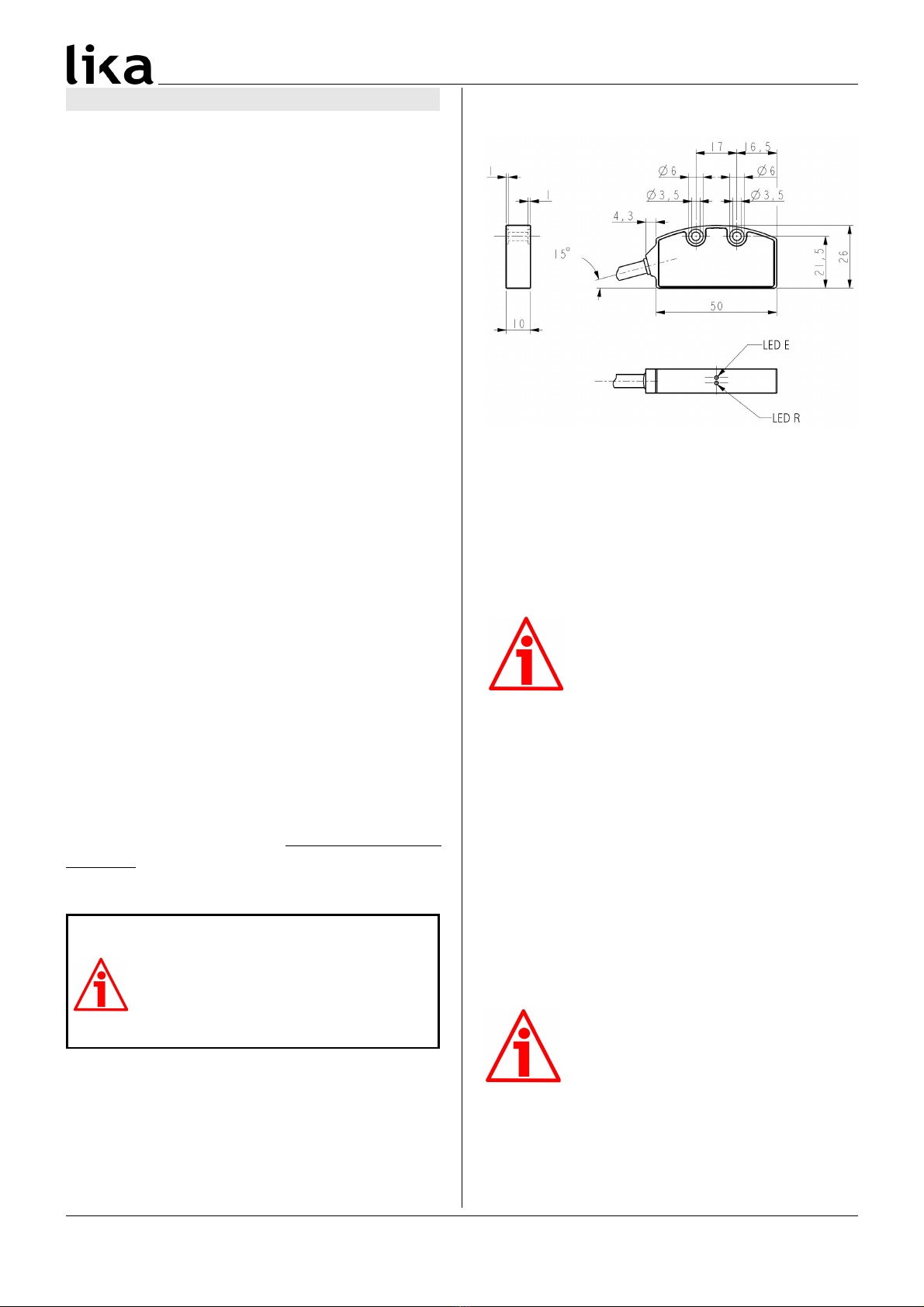
3 – Dimensioni di ingombro
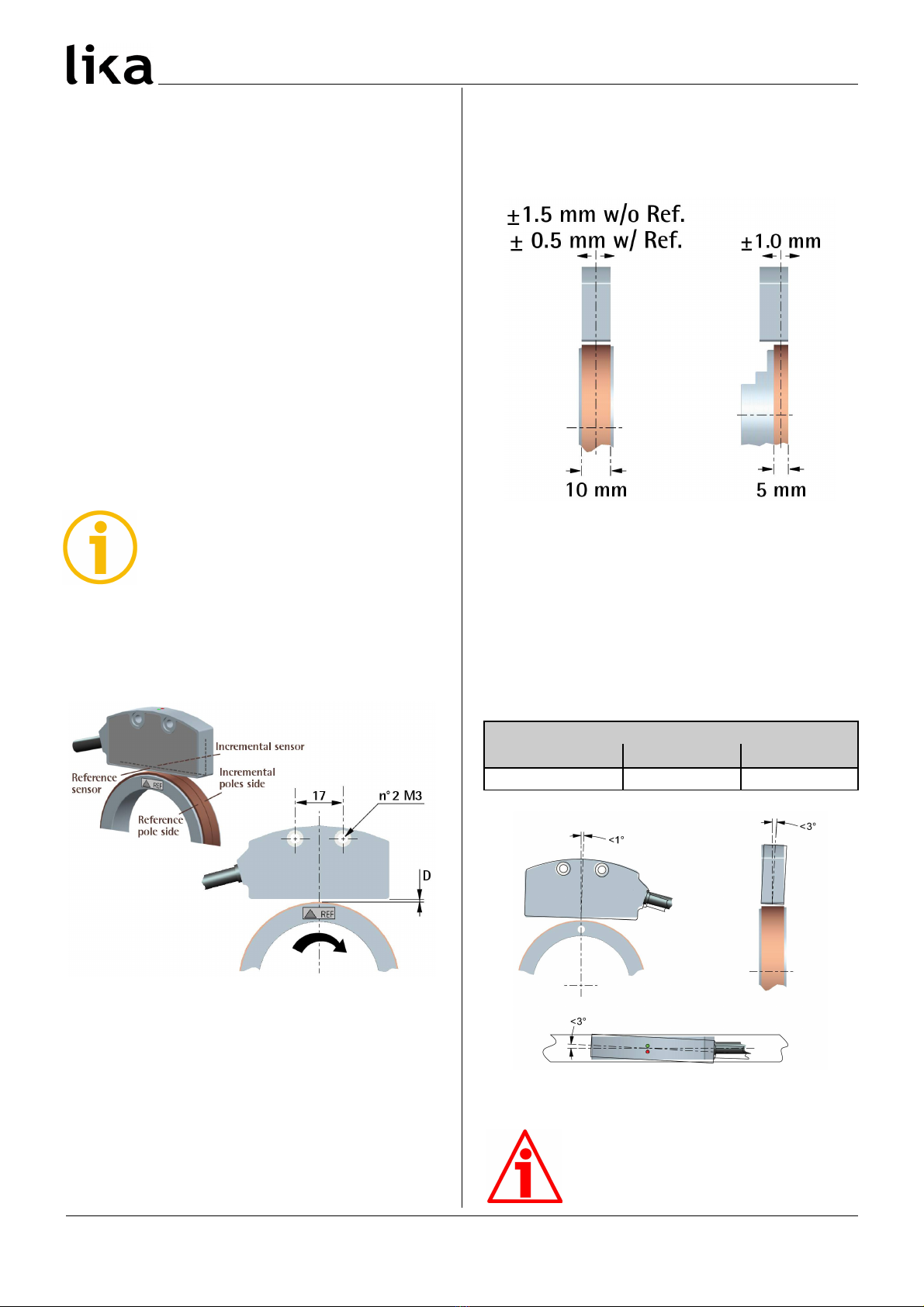
4 - Installazione
5 - Istruzioni di montaggio
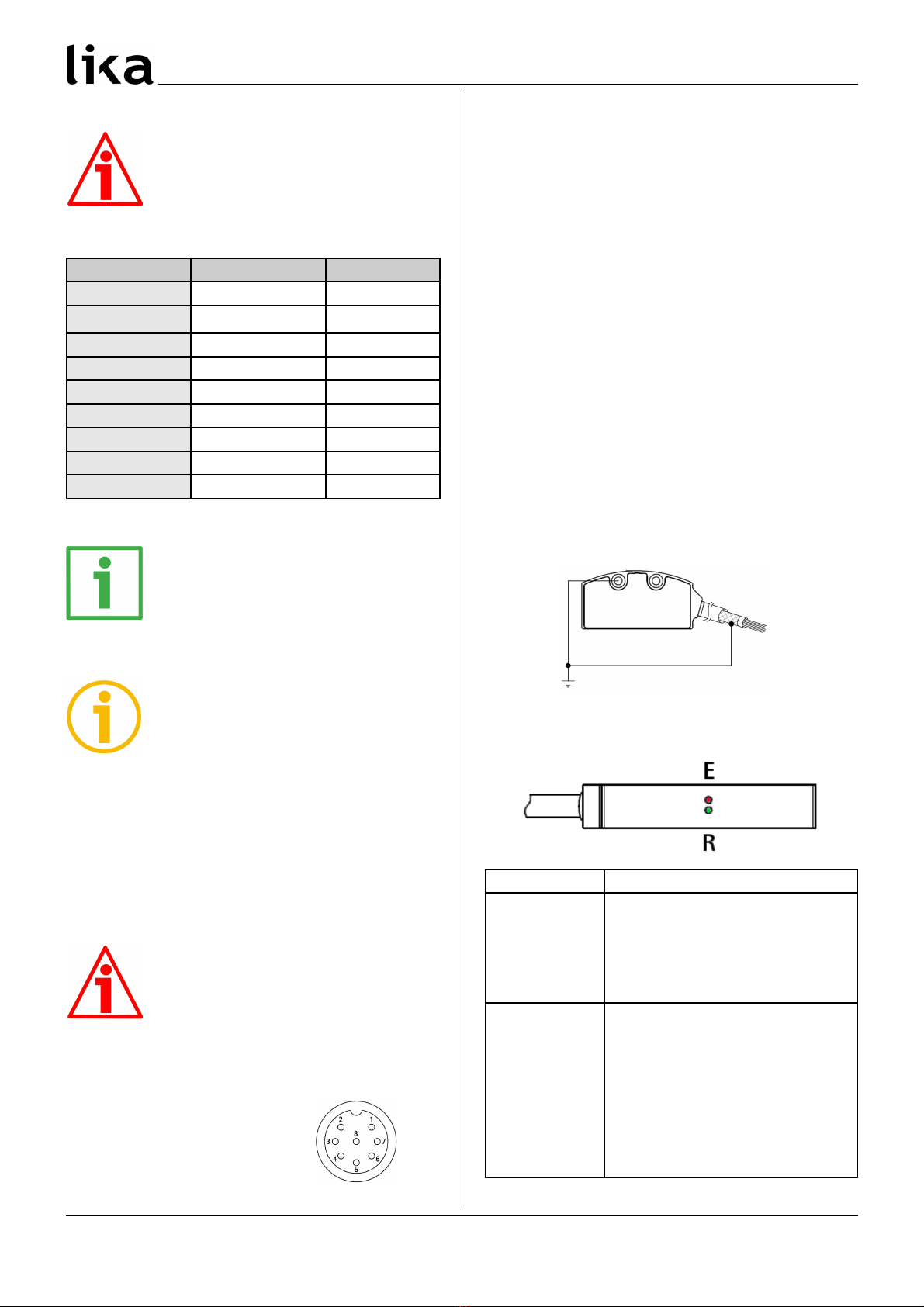
6 - Connessioni elettriche
7 - Segnali di uscita
8 - Manutenzione
9 - Risoluzione dei problemi
1 - Norme di sicurezza
1.1 Sicurezza
•Durante l’installazione e l’utilizzo del dispositivo
osservare le norme di prevenzione e sicurezza sul
lavoro previste nel proprio paese;
•l’installazione e le operazioni di manutenzione devono
essere eseguite da personale qualificato, in assenza di
tensione e parti meccaniche in movimento;
•utilizzare il dispositivo esclusivamente per la funzione
per cui è stato costruito: ogni altro utilizzo potrebbe
risultare pericoloso per l'utilizzatore;
•alte correnti, tensioni e parti meccaniche in movimento
possono causare lesioni serie o fatali;
•non utilizzare in ambienti esplosivi o infiammabili;
•il mancato rispetto delle norme di sicurezza o delle
avvertenze specificate in questo manuale è considerato
una violazione delle norme di sicurezza standard
previste dal costruttore o richieste dall'uso per cui lo
strumento è destinato;
•ika Electronic s.r.l. non si assume alcuna responsabilità
per eventuali danni o lesioni derivanti dall'inosservanza
delle norme di sicurezza da parte dell'utilizzatore.
1.2 Avvertenze elettriche
•Effettuare le connessioni elettriche esclusivamente in
assenza di tensione;
•rispettare le istruzioni relative alle connessioni riportate
nella sezione “6 - Connessioni elettriche”;
•i cavi dei segnali d’uscita non utilizzati devono essere
isolati singolarmente;
•in conformità alla normativa 2004/108/CE
sulla compatibilità elettromagnetica
rispettare le seguenti precauzioni:
- prima di maneggiare e installare il dispositivo, eliminare
la presenza di carica elettrostatica dal proprio corpo e
dagli utensili che verranno in contatto con il
dispositivo;
- alimentare il dispositivo con tensione stabilizzata e
priva di disturbi, se necessario, installare appositi filtri
EMC all’ingresso dell’alimentazione;
- utilizzare sempre cavi schermati e possibilmente
“twistati”;
- non usare cavi più lunghi del necessario;
- evitare di far passare il cavo dei segnali del dispositivo
vicino a cavi di potenza;
- installare il dispositivo il più lontano possibile da
eventuali fonti di interferenza o schermarlo in maniera
efficace;
- per garantire un funzionamento corretto del
dispositivo, evitare l'utilizzo di apparecchiature con
forte carica magnetica in prossimità dell'unità;
MAN SMRI5 I_E 1.3.odt 1 www.lika.it
www.lika.biz