AV44 Solid Shaft Incremental Encoder 2Rev: 003
With a direct drive, use a flexible disc coupling and align the shafts as
accurately as possible. For motors with a pre-aligned flange, it is also
acceptable to use a “spider” or “jaw” coupling type. If a rubber slinger
disc is used, position it on the shaft so it will rotate freely.
CAUTION
Do not force or drive the coupling onto the shaft, or damage
to the bearings may result. The coupling should slide easily
on the shaft. Remove nicks and burrs if necessary. Consider
driving shaft endplay & axial movement when positioning
coupling.
NOTE
Care must be taken to eliminate the potential for coupling
failures due to motor/encoder shaft misalignment. In
addition to coupling failures, misalignment can cause
excessive axial pressure &/or vibration which can result
in bearing damage. A typical installation should have max
0.001” [0.025mm] motor shaft/stub shaft Total Indicated
Runout (TIR). Alignment of motor and encoder shaft should
be ensured by precise fitment between mounting flange
and motor face, and between mounting flange and encoder
flange.
NOTE
Follow coupling manufacturer’s instructions for Max RPM,
Misalignment Tolerance, Installation Instructions, and other
pertinent guidance.
ENCODER MOUNTING INSTRUCTIONS
(When used with“flowerpot”/”coupling guard” type mounting flange)
1) Disconnect power from equipment and encoder cable.
2) Use dial indicator gauge to verify the motor shaft Total Indicated
Runout (TIR) 0.001” [0.025mm]
3) Place coupling on motor shaft, inserting to depth and affixing per
manufacturer’s instructions.
4) Attach/Affix coupling to motor shaft using set screws per
manufacturer’s instructions.
5) Slide encoder shaft into other side of coupling. DO NOT FORCE.
6) B10 flange with 11mm shaft with keyway: Align and affix per
coupling manufacturer instructions.
6.a) PY flange with 10mm shaft with flat: If coupling utilizes set
screw, ensure coupling set screw aligns with the flat on the shaft.
Affix per coupling manufacturer instructions.
7) Ensure C-Face on mounting flange matches and aligns with
encoder C-Face precisely.
8) Apply thread locker to socket head cap screws (supplied).
9) Align bolt holes of encoder flange and the mounting flange
(“flowerpot”), thread in socket head cap screws.
Torque to 5 ft-lb [7 N-m].
10) Tighten fasteners on encoder side of coupling per manufacturer’s
instructions.
NOTE
Both PY and B10 versions can be adapted for foot-mount
mounting. Contact factory for options.
WIRING INSTRUCTIONS
CAUTION
Disconnect power before wiring the encoder
12.a) For units with factory-installed connector(s) (such as M23/12-pin
& M12-8 10 Pin MS) connect cable as shown in wiring diagram.
12.b) For units with factory-installed cable, terminate as required per
local installation.
12.c) For unwired units remove encoder cover, and:
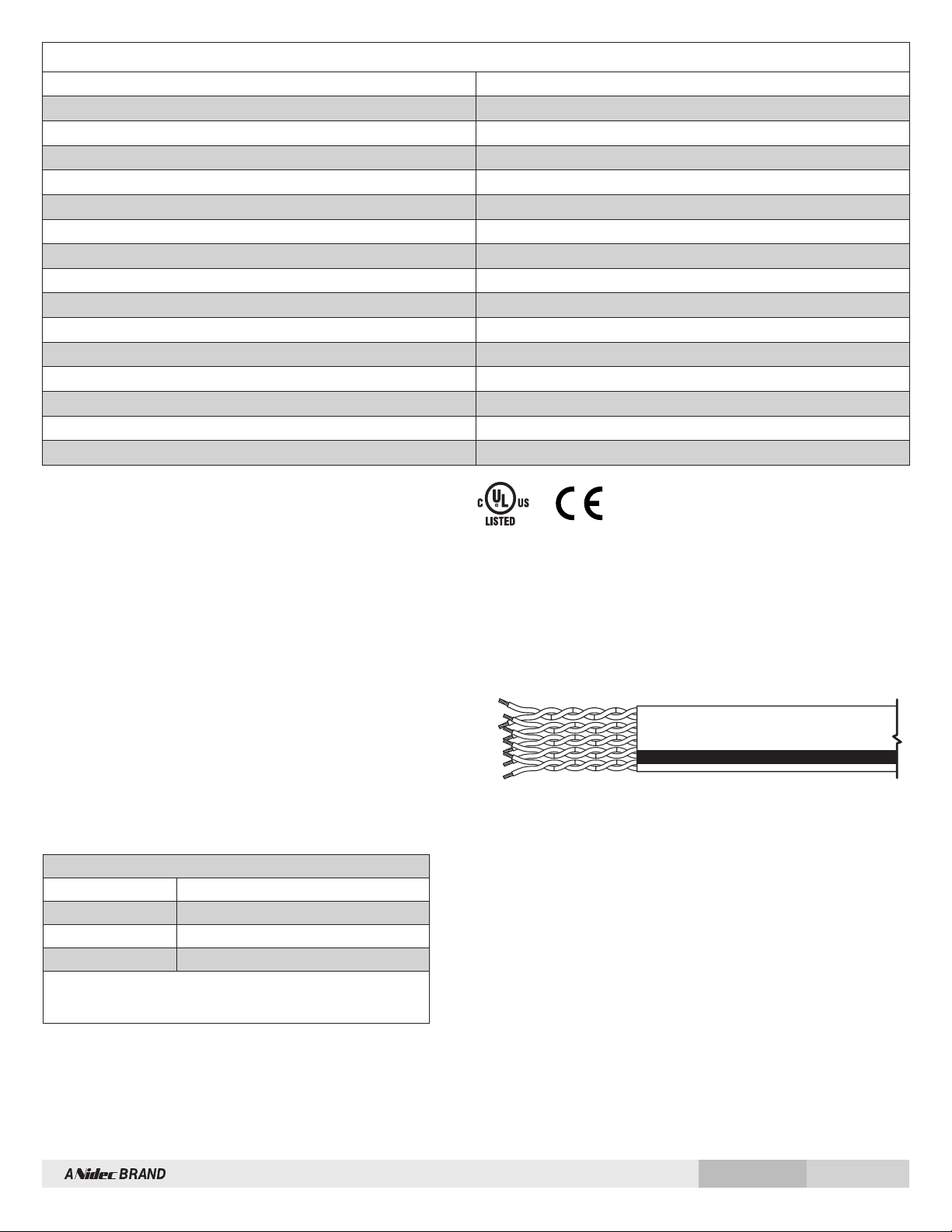
12.c-i) Strip cable and wires per illustration.
12.c-ii) Fold cable shield back over the claw.
12.c-iii) Remove the sealing nut, claw, and seal from the cable gland
and pass cable through the nut, claw and seal in the order in
which they were assembled on the encoder housing.
12.c-iv) Slide seal inside claw and pass wires through cable gland.
12.c-v) Connect wires according to pinout diagram on encoder label.
12.c-vi) Re-tighten sealing nut onto cable gland.
12.c-vii) Replace rear cover onto the encoder.
NOTE
The internal Terminal Strip is a Push-In type with 45° wire
entry. Wires can be removed from the Terminal Strip by
depressing the tab at each connection.
CAUTION
Trim wires to minimize excess length, as space inside the
encoder is limited.
13) Apply power to the encoder.
The AV44 encoder can be wired for single phase or two-phase
operation, either with or without complements, with or without markers.
See connector options and wiring diagrams.
CAUTION
When wiring for differential applications (A, /A, B, /B, Z, /Z),
A and /A should be wired using one twisted, shielded pair;
B and /B should be in a second pair, etc. Failure to use
complementary pairs (say, using A and B in a twisted pair)
will reduce noise immunity significantly.
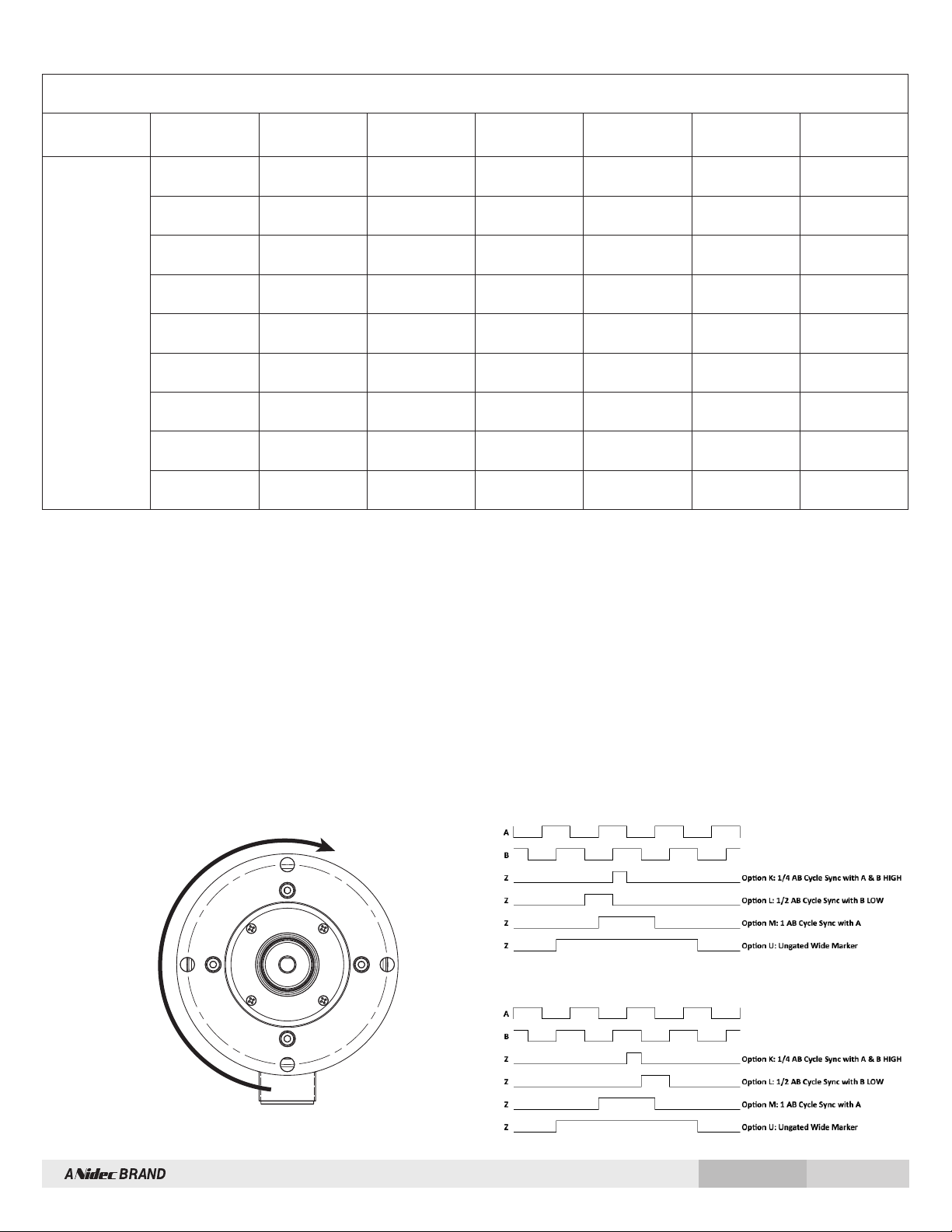
For encoder output that correctly reflects the direction of rotation, proper
phasing of the two output channels is important. Phase A channel leads
phase B channel for clockwise shaft rotation as viewed from the load
side of motor for standard phasing options. Follow instructions under
corrective installation as needed to reverse the direction of output or
purchase AV44 with reverse phasing (Connector options “B”, “3”).