Page 7
Introduction
The 890SD Standalone Drive is designed for speed control of standard ac 3-phase motors.
Control it remotely using configurable analogue and digital inputs and outputs.
Control it locally using the 6901 Keypad.
Use the Design System Explorer Configuration Tool (DSE 890) to give access to parameters,
diagnostic messages, trip settings and application programming.
Fit Options to the unit to give serial communications and closed loop speed control.
IMPORTANT:
Motors used must be suitable for Inverter duty.
About this QuickStart
This QuickStart will:
Familiarise you with the terminals and operation of the unit.
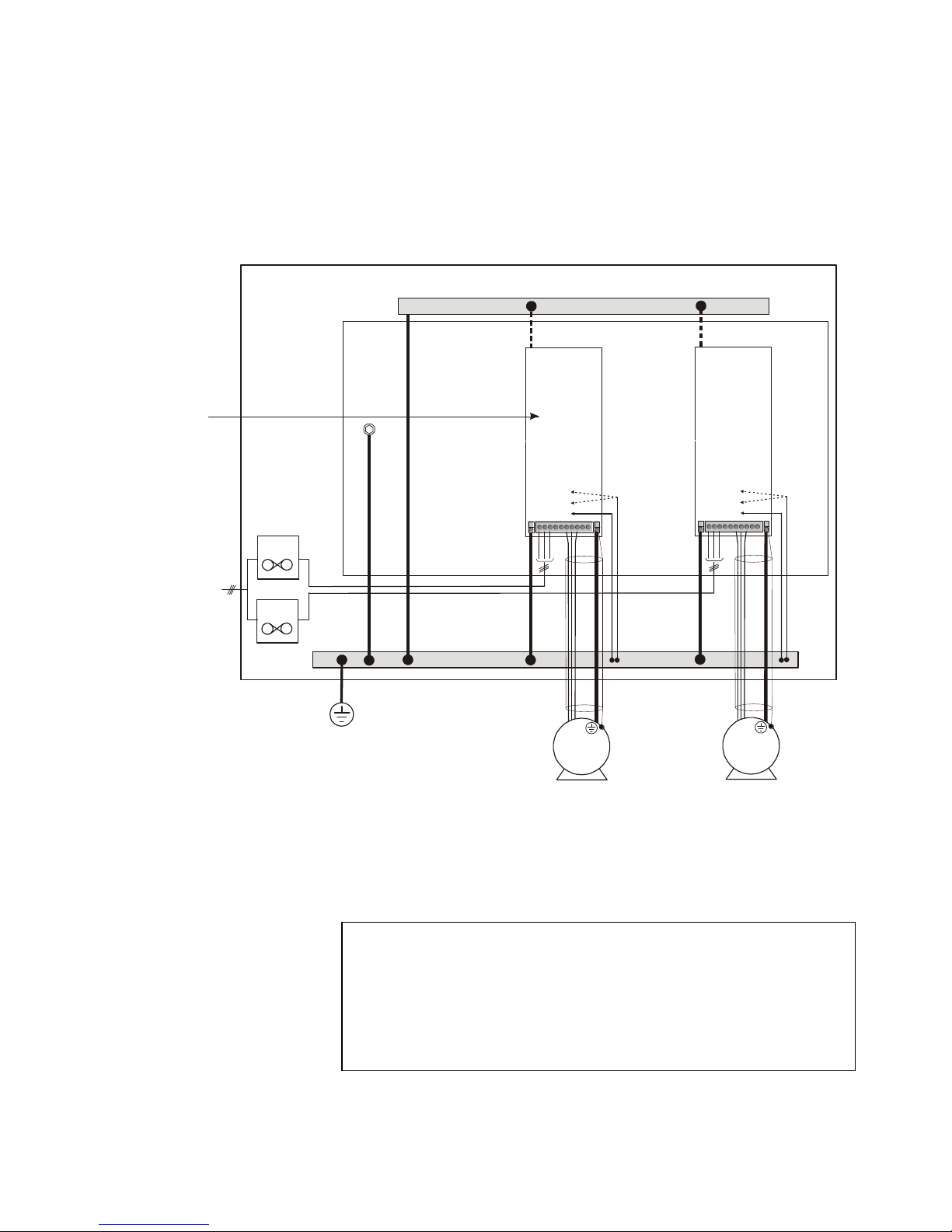
Provide *basic installation details and a quick set-up procedure.
Show you how to Autotune the drive and start the motor.
* Because the 890 is a system product and we have no knowledge of your application, we detail the
quickest way to power-up the drive using a simple earthing scheme with minimal control wiring.
Refer to the full Engineering Reference Manual for items not covered in this QuickStart.
Provided with every 890 unit is a :
Quickstart
890 Installation Kit and instruction leaflet
6901 Keypad
Customer-ordered Options
This QuickStart assumes that:
You are a qualified technician with experience of installing this type of equipment.
You are familiar with the relevant standards and Local Electric Codes (which take precedence).
You have read and understood the Safety information provided at the front of this QuickStart.
You realise that this guide contains only basic information and that you may need to refer to the
Engineering Reference Manual to complete your installation.
You are not using the Safe Torque Off (STO) feature of this product and that you will disable it as
instructed in this QuickStart manual.
Safety Note –Use of the STO feature requires full compliance with the STO chapter 6 of the
Engineering Reference Manual to which the user must first refer.