TABLE of CONTENT
Revision History................................................................................................................................. I
Terminology....................................................................................................................................... II
1. Safety Notice.................................................................................................................................1
2. Introduction....................................................................................................................................2
3. Product Specifications.................................................................................................................3
4. Interface......................................................................................................................................... 4
4.1 Power Supply..................................................................................................................... 4
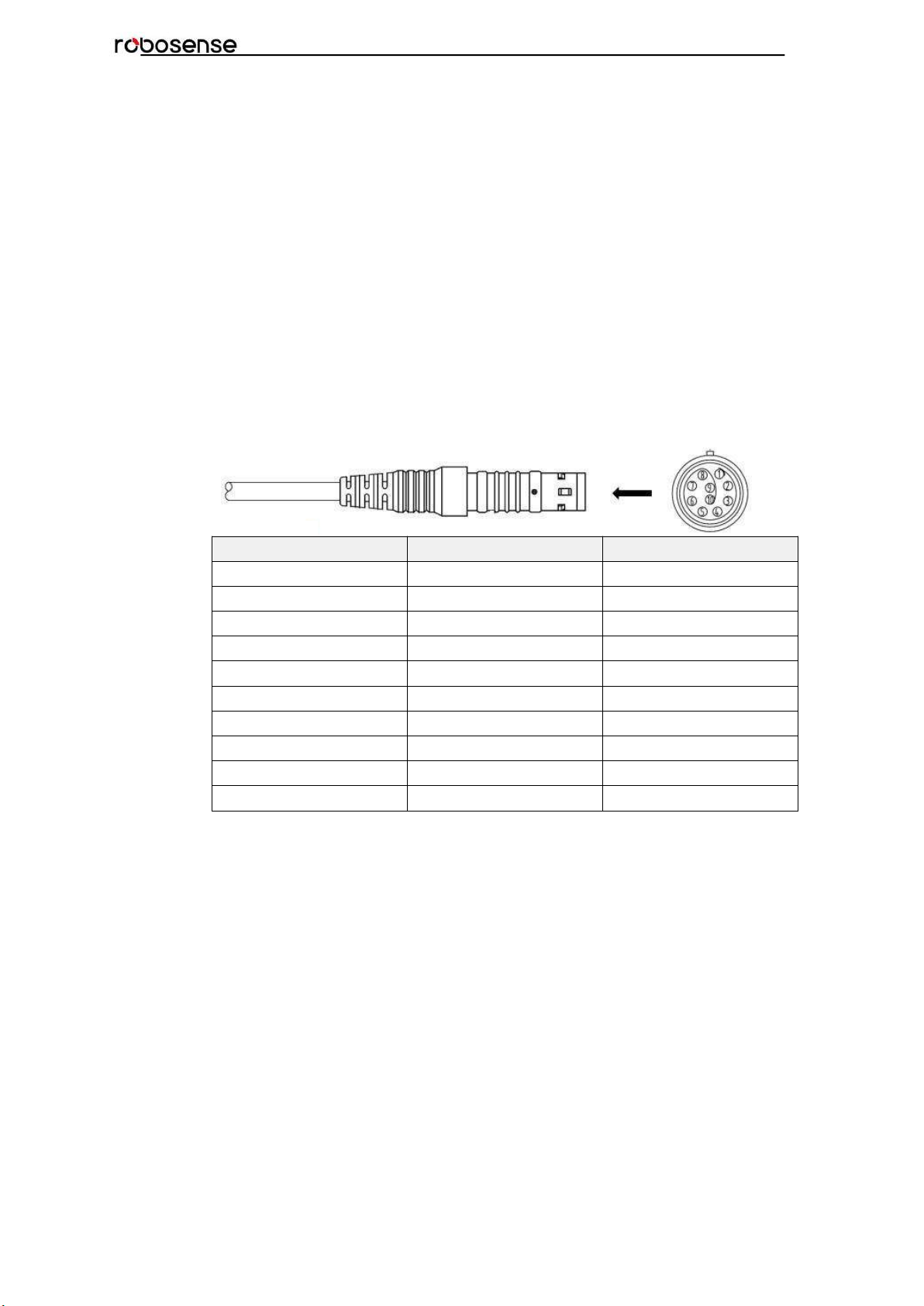
4.2 Data Output interface of LiDAR.......................................................................................4
2.3 Interface Box.......................................................................................................................4
2.4 Connection of Interface Box.............................................................................................6
5. Communication Protocol.............................................................................................................7
5.1 MSOP.................................................................................................................................. 7
5.1.1 Header......................................................................................................................9
5.1.2 Data Field.............................................................................................................. 10
5.1.3 Tail........................................................................................................................... 11
5.1.4 MSOP Data Package...........................................................................................11
5.2DIFOP................................................................................................................................. 12
5.3UCWP................................................................................................................................. 13
6. GPS Synchronization................................................................................................................ 16
6.1 GPS Synchronization Theory........................................................................................ 16
6.2 GPS Usage....................................................................................................................... 16
7. Key Characteristic...................................................................................................................... 17
7.1 Return Mode..................................................................................................................... 17
7.1.1 Return Mode Principle......................................................................................... 17
7.1.1The Strongest Return........................................................................................... 17
7.1.2Strongest, Last and Dual Returns...................................................................... 17
7.1.3Return Mode Flag..................................................................................................17
7.2 Phase Lock....................................................................................................................... 18
8. Point Cloud..................................................................................................................................19
8.1 Coordinating Mapping.....................................................................................................19
9. Definition of Vertical Angles......................................................................................................20
10. Reflectivity................................................................................................................................. 22
11. Troubleshooting........................................................................................................................ 23
Appendix A Point Time Calculate.................................................................................................24
A.1 RS-Bpearl Calculation of time stamp in single mode................................................24
A.2 RS-Bpearl Calculation of time stamp in dual mode...................................................26
Appendix B Information Registers............................................................................................... 28
B.1 Motor(MOT_SPD)........................................................................................................... 28
B.2 Ethernet(ETH).................................................................................................................. 28
B.3 FOV Setting (FOV SET)................................................................................................. 29
B.4 Motor Phase Offset (MOT_PHASE).............................................................................29