RS-Ruby Lite Users’ Manual
TABLE OF CONTENTS
1 Safety Notice..................................................................................................................................1
2 Introduction.....................................................................................................................................2
3 Product Specifications..................................................................................................................3
4 Interface.......................................................................................................................................... 4
4.1 Power Supply..................................................................................................................... 4
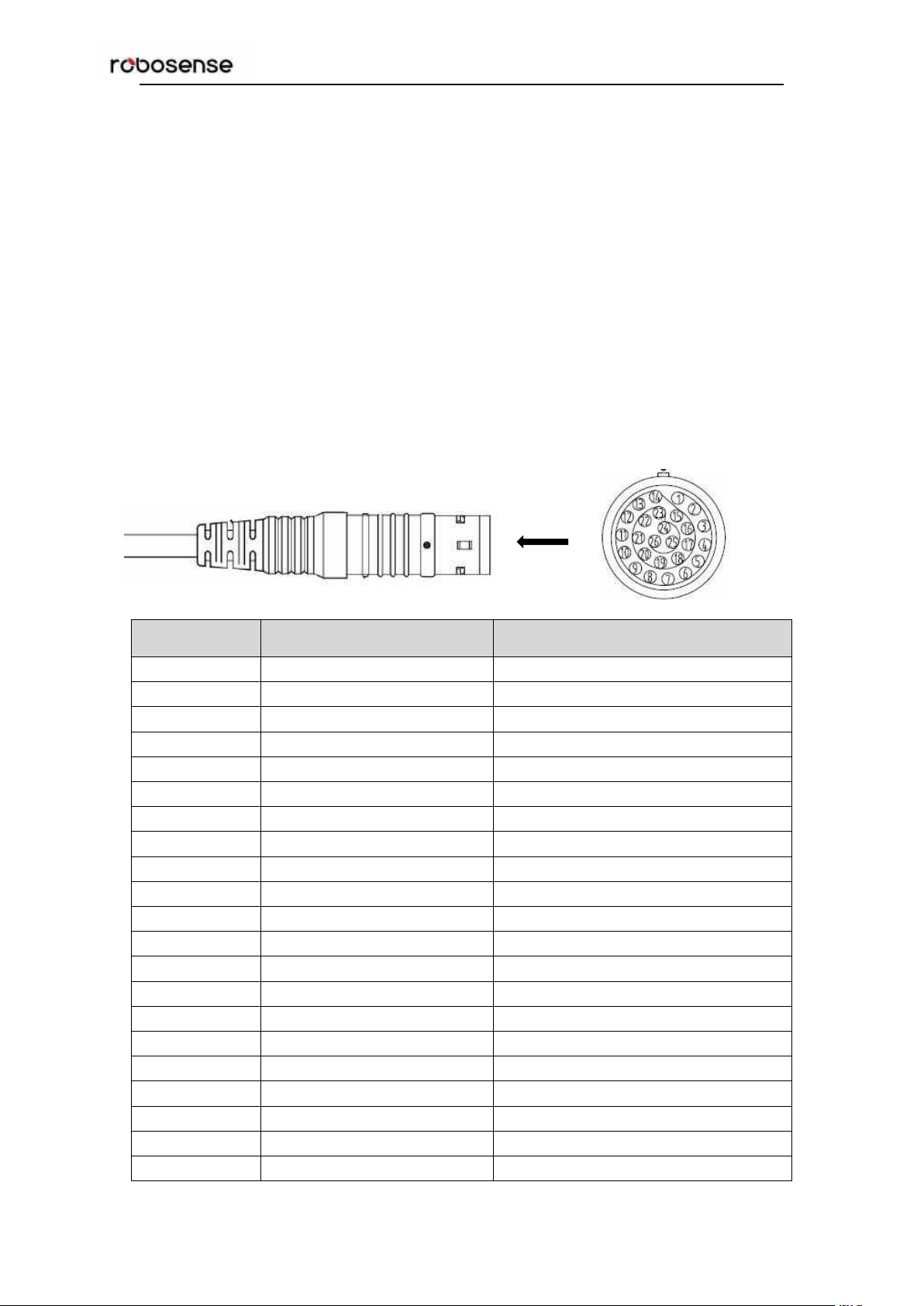
4.2 Data Output Interface of LiDAR...................................................................................... 4
4.3 Interface Box...................................................................................................................... 5
4.4 Interface Box Connection.................................................................................................6
5 Communication Protocol..............................................................................................................7
5.1 MSOP.................................................................................................................................. 8
5.1.1 Header......................................................................................................................9
5.1.2 Data Field................................................................................................................ 9
5.1.3 Tail...........................................................................................................................10
5.1.4 MSOP Data Package.......................................................................................... 10
5.2 DIFOP................................................................................................................................11
6 Time Synchronization.................................................................................................................13
6.1 GPS Synchronization......................................................................................................13
6.1.1 Principle of GPS Synchronization..................................................................... 13
6.1.2 GPS Usage........................................................................................................... 13
6.2 Precision Time Protocol (PTP)...................................................................................... 14
6.2.1 Principle of PTP....................................................................................................14
6.2.2 Topology of PTP................................................................................................... 14
6.2.3 Time Calculation...................................................................................................15
7 Key Specifications...................................................................................................................... 17
7.1 Return Mode.....................................................................................................................17
7.1.1 The Principle of Return Mode............................................................................ 17
7.1.2 Strongest Return.................................................................................................. 17
7.1.3 Strongest, Last and Dual Return Signal.......................................................... 17
7.1.4 Return Mode Flag................................................................................................ 17
7.2 Phase Lock....................................................................................................................... 17
8 Point Cloud...................................................................................................................................19
8.1 Coordinating Mapping.................................................................................................... 19
8.2 Laser Channel in Spatial Distribution...........................................................................20
9 Reflectivity.................................................................................................................................... 23
10 Troubleshooting........................................................................................................................ 24
Appendix A Websever................................................................................................................... 26
A.1 Visiting Websever........................................................................................................... 26
A.2 Parameter Setting........................................................................................................... 27
A.3 Device Diagnose/ Operating Status............................................................................ 28
A.4 Firmware Update.............................................................................................................29
Appendix B The Format of all Register...................................................................................... 30
B.1 Motor Speed (MOT_SPD)............................................................................................. 30