senseFly eBee User manual

Extended User Manual
eBee and eBee Ag
Revision 12 / September 2014
Copyright © 2010-2014 senseFly Ltd

GENERAL INFORMATION
READ THIS USER MANUAL CAREFULLY BEFORE USING A SENSEFLY LTD PRODUCT.
senseFly Ltd products are intended for professional use only.
Applicable Regulations
senseFly Ltd products are subject to Civil Aviation regulations. Regulations may vary depending on the country
where you intend to operate your product.
ANY USE OF SENSEFLY LTD PRODUCTS IN BREACH OF THE LAW OF THE COUNTRY WHERE YOU OPERATE THE PRODUCT
IS UNDER YOUR SOLE RESPONSIBILITY.
INFORM YOURSELF BEFORE USING THE PRODUCT. SOME COUNTRIES MAY HAVE LAWS THAT LIMIT THE USE OF UN-
MANNED AIRCRAFT TO ‘LINE-OF-SIGHT’ OPERATIONS AND/OR PROHIBIT THE USE OF UNMANNED AIRCRAFT AT ALL
OR IN SPECIFIC AREAS.
Privacy
Recording and circulating an image of an individual may constitute an infringement of their image and privacy for
which you can be liable. Ask for authorization before taking pictures of an individual, particularly if you want to keep
your recordings and/or circulate images on the Web or any other medium. Do not circulate degrading images or
ones that could undermine the reputation or dignity of an individual. Check that your use of the cameras on board
senseFly Ltd products comply with the legal provision on privacy in the country where you operate your product.
Limited Warranty
SenseFly Ltd warrants that the product will be free from defects in material and workmanship for a period of twelve
(12) months from the date of delivery. SenseFly Ltd further warrants that the product will perform substantially in
accordance with its specification. During the warranty period senseFly Ltd’s sole liability shall be at senseFly Ltd’s
sole option, either to repair or to replace the defective product with another product or a product with similar spec-
ifications, at no charge, or to reimburse the purchase price of the product, or if repair or replacement is not possible,
issue a credit note; provided however, that the defect has been confirmed by senseFly Ltd and that the defective
product is returned to senseFly Ltd in accordance with the support and repair form together with all required flight
logfiles.
Warranty does not apply, without limitation, in case: a) the products are not stored and used according to their
specifications, b) the products are damaged due to carelessness, negligence, or wrong use by the user, and c) for
defects due to normal wear and tear including, but not limited to, deterioration to the airframe after first flight,
normal degradation, misuse, moisture or liquids, proximity or exposure to heat, accidents, excessive strain, abuse,
neglect, misapplication, repairs or modifications made by third party other than senseFly Ltd, damage due to manual
operation, damage due to take-off or landing location with obstacles, damage due to low altitude flight, damage due
to loss of data radio connection, damage due to strong wind, rain or humidity, or other causes for which senseFly Ltd
has no control.

THE FOREGOING WARRANTIES ARE IN LIEU OF ALL WARRANTIES, EITHER EXPRESSED OR IMPLIED, INCLUDING WITH-
OUT LIMITATION ANY IMPLIED WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE, AND OF
ANY OTHER OBLIGATION ON THE PART OF SENSEFLY LTD.
Limitation of liability
TO THE EXTENT PERMITTED BY APPLICABLE LAW, IN NO EVENT WILL SENSEFLY LTD BE LIABLE FOR ANY LOSS OF REV-
ENUE, LOSS OF PROFIT, LOSS OF DATA, OR INDIRECT, SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES, EVEN IF
SENSEFLY LTD HAS BEEN NOTIFIED OF THE POSSIBILITY OF SUCH DAMAGES, AND WHETHER THIS LIABILITY ARISES
FROM A CLAIM BASED ON CONTRACT, WARRANTY, TORT OR OTHERWISE, WITH THE EXCEPTION OF GROSS NEGLI-
GENCE AND DEATH.
YOU SHALL AT ALL TIMES OPERATE THE PRODUCT IN AREAS OR UNDER CIRCUMSTANCES SO AS TO GUARANTY SE-
CURITY AND SAFETY OF PEOPLE, PROPERTY AND ANIMALS.
Copyrights
senseFly Ltd reserves the right to make changes to specifications and product descriptions contained in this docu-
ment at any time without notice. Please consult www.sensefly.com for the latest release.
Copyright © 2014 senseFly Ltd. All rights reserved. REPRODUCTION, USE OR DISCLOSURE OF ALL OR IN PART OF THIS
MANUAL TO THIRD PARTIES WITHOUT THE PRIOR WRITTEN PERMISSION OF SENSEFLY LTD IS STRICTLY PROHIBITED.


Welcome to your eBee
Congratulations on your purchase of the eBee, a complex and powerful yet intu-
itive autonomous mapping system. We take great care to develop and design the
best possible hardware and software tools for quick, high-quality and easy-to-use
2D and 3D aerial mapping.
Note: This manual refers to the version 2.4 of eMotion and version 3.2
of Postflight Terra 3D software. Check the software version included
in your package and consult the Release Notes for potential changes
included in more recent versions of the software.

Package contents
eBee
battery
packs
wing wingeBee
central body
spare
propeller
camera
User manual
ground
modem
battery
charger
EPP
glue
remote control,
cables and
propeller
attachment
bands
eBee
battery
charger
cable
camera
charger

The standard eBee package contains the following items:
•1x carrying case with foam protection
•1x eBee central body with built-in autopilot
•1x pair of detachable wings
•1x spare propeller
•10x spare propeller attachment rubber bands
•2x Lithium-Polymer battery packs
•1x Lithium-Polymer battery charger (including cables)
•1x 2.4 GHz USB ground modem for radio data link (including USB cable)
•1x 2.4 GHz remote control (including including 3 AA batteries)
•1x still camera (including memory card, battery and charger)
•1x USB cable for interfacing with camera and on-board autopilot
•1x EPP glue
•1x eBee User Manual
•1x camera User Manual
Depending on your order, your package may also include other items, such as
additional payloads. Please verify upon delivery that your package is complete.
In case of a missing item, please contact your eBee reseller immediately.
Note: Camera user manuals are also available to download from
sensefly.com/support/download.
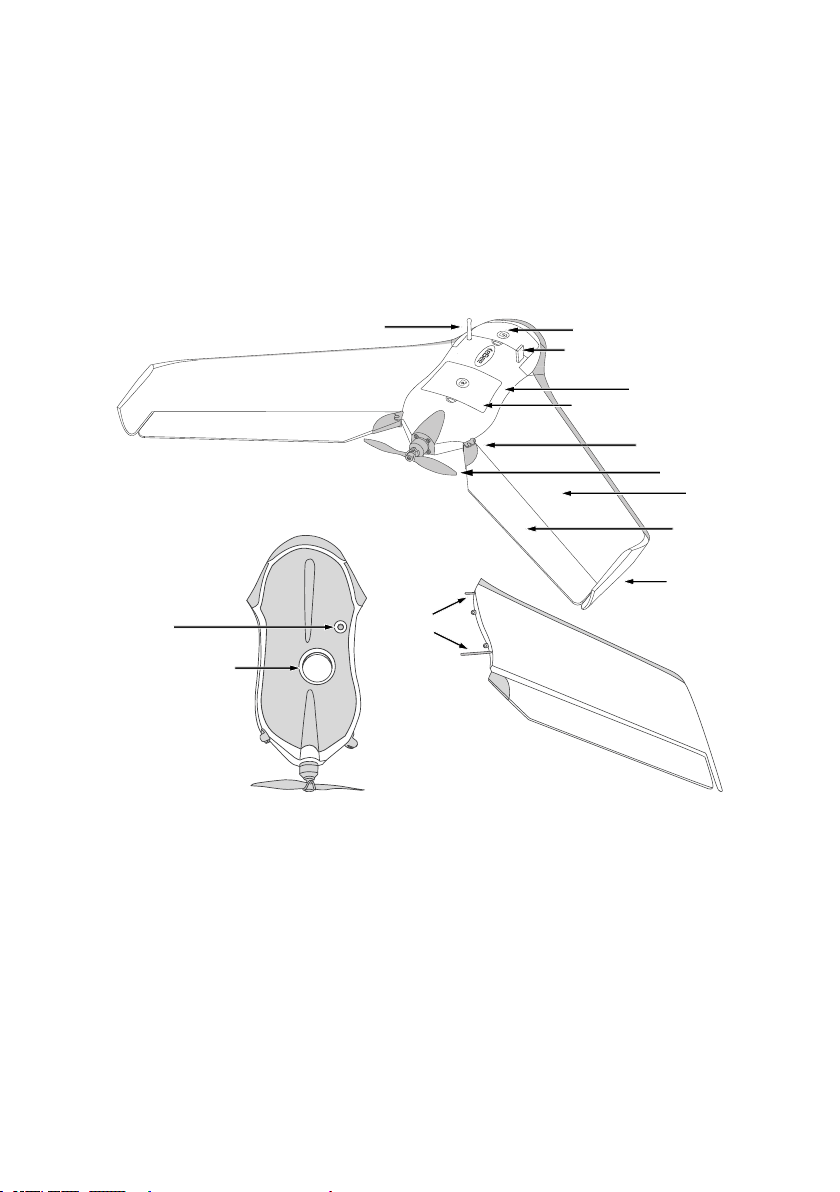
Hardware features
Top face of the eBee
battery compartment
aileron
winglet
propeller
rvo connection
mechanism
data link antenna
tot probe, status LED
wing
ra compartment
central body
Bottom face of
the central body
ground
sensor
camera lens hole
Detachable
wing
wing
struts
se
pi
came
The eBee is an autonomous flying drone comprised of the following components:
•Central body: This is the core of the eBee and includes all the electronics,
actuators and communications hardware on-board the drone.
•Wing: The two wings of the eBee are detachable for storage and replace-
ment. Each wing has two wing struts and two clips to hold it in place within
the central body.

•Winglets: These structures add aerodynamic stability to the drone while it
is in flight.
•Ailerons: Used to control the eBee while in flight.
•Servo connection mechanism: The ailerons are connected to the servo-
motors within the central body of the drone through this connection mech-
anism.
•Propeller: Used to generate thrust while it is in flight.
Caution: When attached to the motor the propeller spins at high
speeds and can be potentially dangerous if it comes into contact with
exposed skin. Be sure to always keep your hands clear of the propeller
when the battery is attached to the eBee.
•Battery compartment: The eBee is powered by a LiPo (Lithium Polymer)
battery stored within the battery compartment.
Caution: Proper care of your battery is essential. Please read section
‘Proper battery care’ on page 135 before using your drone for the first
time.
•Camera compartment: TheeBee features a built-in camera for taking aerial
images stored within the camera compartment.
•Data Link Antenna: Used by the drone to communicate with the eMotion
software through the USB ground modem.
•Pitot probe: This is the sensor used by the eBee to detect airspeed, wind
and altitude. It must be kept clean and clear of obstructions to function
properly.
•Status LED: This coloured LED displays the current state of the eBee. It is
housed underneath the pitot probe and thus illuminates the entire trans-
parent probe in various colours depending on the drone’s state.

•Ground sensor: The ground sensor, composed of a high-speed optical
sensor and lens assembly, is used to detect the proximity of the ground.

Software features
The eBee package allows for the download and use of eMotion * and Postflight
Terra 3D * at no extra cost.
eMotion is the integrated software package that allows you to interact with your
eBee. Its easy-to-use interface allows you to plan a mapping flight intuitively from
the comfort of your office or directly in the field. Once the drone is launched, you
can use eMotion’s wireless connection with your eBee to track its position, monitor
the progress of your mapping flight and send commands if desired.
Once your eBee returns after an aerial mapping flight it is the turn of Postflight
Terra 3D to process the captured images fully automatically. Postflight Terra 3D is
a full-featured mapping solution: with just a few mouse clicks it can create high-
quality geo-referenced 2D and 3D orthomosaics and digital elevation/surface mod-
els (DEM/DSM). While you are still in the field Postflight Terra 3D analyses the qual-
ity of the captured images and generates an easy to understand report, letting you
know immediately if the data you captured meets your mapping requirements.
∗Software access terms and conditions apply. Postflight Terra 3D is limited to eBee images only.


Contents
I Quick start guide 17
1 Planning and simulating a flight 18
1.1 Installing eMotion,Postflight Terra 3D, and the ground modem
drivers ............................... 18
1.2 The eMotion interface ....................... 19
1.3 Creating a new flight plan . . . . . . . . . . . . . . . . . . . . . 21
1.4 The mission phase of a flight . . . . . . . . . . . . . . . . . . . . 22
1.5 Simulating your flight . . . . . . . . . . . . . . . . . . . . . . . 24
1.6 Getting ready for a mission . . . . . . . . . . . . . . . . . . . . 25
2 Executing a flight 27
2.1 Weathercheck ........................... 27
2.2 Preparing the eBee forflight.................... 28
2.3 The setup phase of a flight . . . . . . . . . . . . . . . . . . . . . 37
2.4 Take-off............................... 41
2.5 In-flight monitoring and control . . . . . . . . . . . . . . . . . . 44
2.6 Landing............................... 46
2.7 Potential in-flight errors . . . . . . . . . . . . . . . . . . . . . . 46
3 Processing image data 48
3.1 Importing images and flight data . . . . . . . . . . . . . . . . . 48
3.2 In-field image quality check . . . . . . . . . . . . . . . . . . . . 51
3.3 Creating advanced mapping products . . . . . . . . . . . . . . 53
II Advanced functionalities 55
4 Understanding aerial mapping with the eBee 56
4.1 Waypoints and their properties . . . . . . . . . . . . . . . . . . 56
4.2 Advanced polygonal mission area . . . . . . . . . . . . . . . . . 60
4.3 3D mission planning using elevation data . . . . . . . . . . . . . 61
4.4 Flight visualization in Google EarthTM ............... 64
4.5 Autonomous controller and modes of flight . . . . . . . . . . . . 66
4.6 Linearlanding ........................... 70
4.7 Flying multiple drones at the same time . . . . . . . . . . . . . 75
4.8 Individual photo targets and oblique imagery . . . . . . . . . . 81
5eMotion in-depth guide 83
5.1 Toolbar............................... 84
5.2 Simulator.............................. 87
5.3 ControlBar............................. 89
5.4 Flight Monitoring tab . . . . . . . . . . . . . . . . . . . . . . . 92
5.5 SetupPhasetab .......................... 96
5.6 Mission Planning tab . . . . . . . . . . . . . . . . . . . . . . . . 100
5.7 Mission Waypoints tab . . . . . . . . . . . . . . . . . . . . . . . 109
5.8 Cameratab............................. 111
5.9 Flight Parameters tab . . . . . . . . . . . . . . . . . . . . . . . 116
6 Manual control of the eBee 120
6.1 Enabling manual control . . . . . . . . . . . . . . . . . . . . . . 120
6.2 Pre-flight testing of the remote control . . . . . . . . . . . . . . 122
6.3 FullManualmode ......................... 123


III Maintenance, Repair and Troubleshooting 127
7 Maintenance and repair of the eBee 128
7.1 Updating the eBee software .................... 128
7.2 Cleaning and storage . . . . . . . . . . . . . . . . . . . . . . . . 131
7.3 Full airframe and sensor inspection . . . . . . . . . . . . . . . . 131
7.4 Repairing the eBee airframe .................... 135
7.5 Proper battery care . . . . . . . . . . . . . . . . . . . . . . . . . 135
8 Troubleshooting 137
8.1 Pre-flighterrors........................... 138
8.2 Take-offvetoes........................... 141
8.3 In-flight warnings . . . . . . . . . . . . . . . . . . . . . . . . . 143
8.4 Criticalfailures ........................... 155
8.5 Resetting default camera settings . . . . . . . . . . . . . . . . . 158
8.6 Improving radio signal communication . . . . . . . . . . . . . . 158
8.7 Losing and locating your eBee in the field . . . . . . . . . . . . . 159
8.8 Reporting a problem with your eBee ................ 160
IV Specifications 161
1 Software requirements 162
2 Drone specifications 163

Part I
Quick start guide
The first part of this document introduces you to the eBee and contains the basic
information you will need to plan and execute a simple mapping project. A typical
mapping project can be divided into three main phases:
1. Planning and simulating a flight: Every project begins with careful plan-
ning, whether it is a quick flight over a small area or a multi-stage flight
in complex terrain. Section ‘Planning and simulating a flight’ on the next
page describes how to use the Mission Planning feature to quickly generate
a flight plan and to test it using the built-in simulator.
2. Executing a flight: Once planning is complete, it is time for the drone to
perform its flight. In section ‘Executing a flight’ on page 27 you will learn
how to prepare your drone for flight, connect it to eMotion, and to monitor
it in flight while it gathers images. Though the eBee can complete a flight
fully autonomously from take-off to landing, you can also modify its flight
plan at any point during flight.
3. Processing image data: The last step in a project is converting the images
taken by your eBee into usable products such as precise geo-referenced or-
thomosaics or 3D terrain models. section ‘Processing image data’ on page 48
leads you through the process of transferring images from the drone to a
computer, checking if the image quality suits your needs while still in the
field and producing advanced 2D and 3D maps.
Quick start guide
1 Planning and simulating a flight
Goal of this section: This section introduces the eMotion software
used to interface with the eBee. It describes the steps required to
plan, simulate, and save a simple mapping flight. A more detailed
description of eMotion and its advanced functions is presented in sec-
tion ‘eMotion in-depth guide’ on page 83.
1.1 Installing eMotion,PostflightTerra3D, and the ground mo-
dem drivers
You can download the latest version of eMotion and Postflight Terra 3D at:
www.sensefly.com/support/download
Use the password provided with your eBee to access the download section.
We recommend that you download and install Google EarthTM to take full advan-
tage of the features of eMotion. You can find more information at the following
address:
www.google.com/earth/
To install eMotion on Windows, simply execute the provided installers for eMotion
and Postflight Terra 3D and follow the on-screen instructions. The eMotion and
Postflight Terra 3D software will be available in the ‘Start’ menu. Drivers for the USB
ground station ground modem will automatically be installed along witheMotion.
In case a problem arises after connecting the ground modem to the computer for
the first time you can find the drivers in one of the following directories (depend-
ing on your version of Windows):
C:\Program Files\senseFly\eMotion 2\usb driver\
C:\Program Files (x86)\senseFly\eMotion 2\usb driver\
18

Planning and simulating a flight
See section ‘Updating the eBee software’ on page 128 if you have any difficulty
with software installation.
1.2 The eMotion interface
Thanks to the powerful tools available within eMotion, designing a mapping flight
for your eBee is a simple process. To get started, launch eMotion and choose what
you would like to do...
•To run a simulation, select the simulator, choose the drone you want to
simulate and click OK.
•To fly a drone, connect your ground modem to your computer and select
Drone. If you have more than one USB device connected to yourPC , choose
the ground modem you want to connect to from the list and click OK. Oth-
erwise, just click OK.
•To process flight data you already created, select the Flight Data Manager
and click OK.
We recommend that you plan flights using a simulated drone. Once connected to
a real or simulated drone you will see the main screen of eMotion.
The main screen of eMotion is split into four sections:
19

Quick start guide
SidebarMap Area
Control
Bar
Toolbar
Status
Panel
Flight Parameters tab
Camera tab
Mission Waypoints tab
Mission Planning tab
Setup Phase tab
Flight Monitoring tab
•Map Area: The Map Area of eMotion displays a map with the drone’s cur-
rent position, indicated by the symbol. A small Status Panel floats be-
side the symbol, indicating important status information including the eBee’s
current altitude (both Above the Take-off Altitude, marked as ATO, and Above
Mean Sea Level, marked as AMSL), battery level, flight time, and status. The
Status Panel can be hidden by clicking on the drone. Moving around the
map is done by clicking and dragging at any place not occupied by a sym-
bol (such as a waypoint or the drone symbol).
20
Other manuals for eBee
1
This manual suits for next models
1
Table of contents
Other senseFly Drone manuals
























