Radar based Blind Spot Information System
MBHL TypA Operating & Integration Manual
Remarks:
Certification Documentation
Revision:
2.1
Date:
12/12/2011
Page:
5 of 29
VALEO-RADAR SYSTEMS, INC.
Laiernstr. 12, D-74321 Bietigheim-Bissingen / Germany
+ 49 (+7142) 916 – 0 + 49 (+7142) 916 – 4000
This document is the exclusive property of Valeo-Raytheon System, Inc.
It cannot be communicated or divulged to anybody without a previous written authorization.
Part I Document scope
1. Radar sensor principle
The Multi Beam Radar MBHL TypA is a radar sensor module used to monitor the
alert zone (or blind area) of a vehicle, i.e. by sensing the back sides of the vehicle
and by reporting to the driver if an object of interest meeting certain criteria in that
area is present, or not. A message is transmitted on the CAN bus within the
vehicle to indicate detection of an object of interest within the alert zone.
Automotive manufacturers use different terms to describe this function, e.g. Blind
Spot Detection System (BSD), Blind Spot Monitoring (BSM), Side Obstacle
Detection (SOD), or Blind Spot Information System (BLIS).
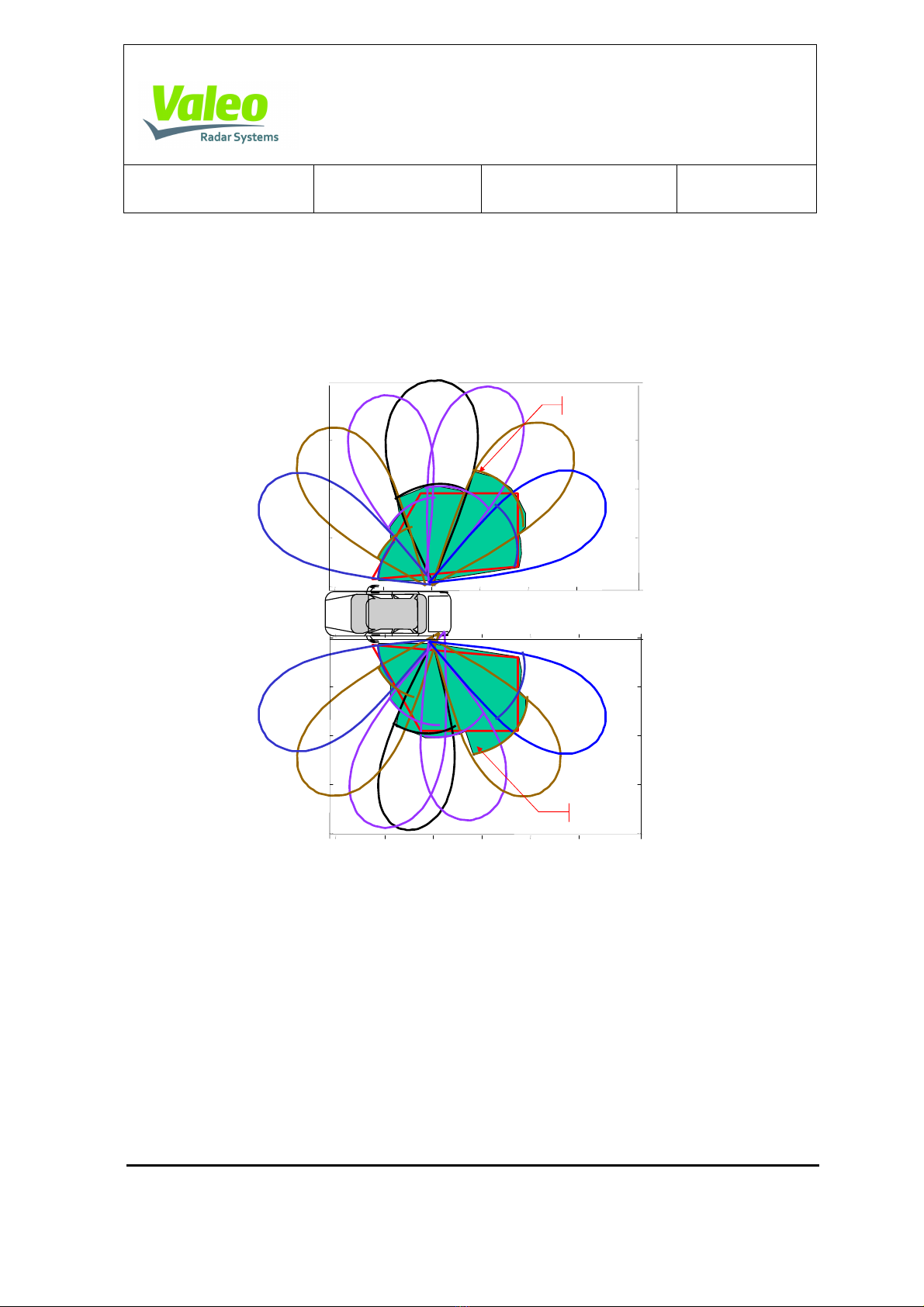
Figure 1 shows how the sensors are placed on the vehicle and how the beams
cover the alert zones on each side.
1.1. System operation
The Multi Beam Radar Sensor modules are to be mounted on each side of a
vehicle near the back, behind the left and right hand side of the bumper with their
radar beams radiating towards the side of the vehicle. Each radar sensor is
operating in a narrow band frequency around of 24.15GHz. Under normal driving
conditions, the sensors receive multiple beams of radar data oriented in a fan
shaped pattern in order to cover the alert zone as shown in figure 1.
Each sensor is able to search its own field of view (FoV) to determine whether an
object of interest (a “licensable vehicle”) is present within the alert zone and
determine whether that object should be reported to the driver. If an object of
interest is present within the alert zone which needs to be reported, an appropriate
message is transmitted over the CAN bus. A notification to the driver will be done
with illuminated amber icons or pictograms on the exterior rear view mirrors or on
the A-pillar.
This continuous scanning of the traffic on the left and right adjacent lanes is the
same for all passenger vehicles, but the shape and size of the blind spot zone