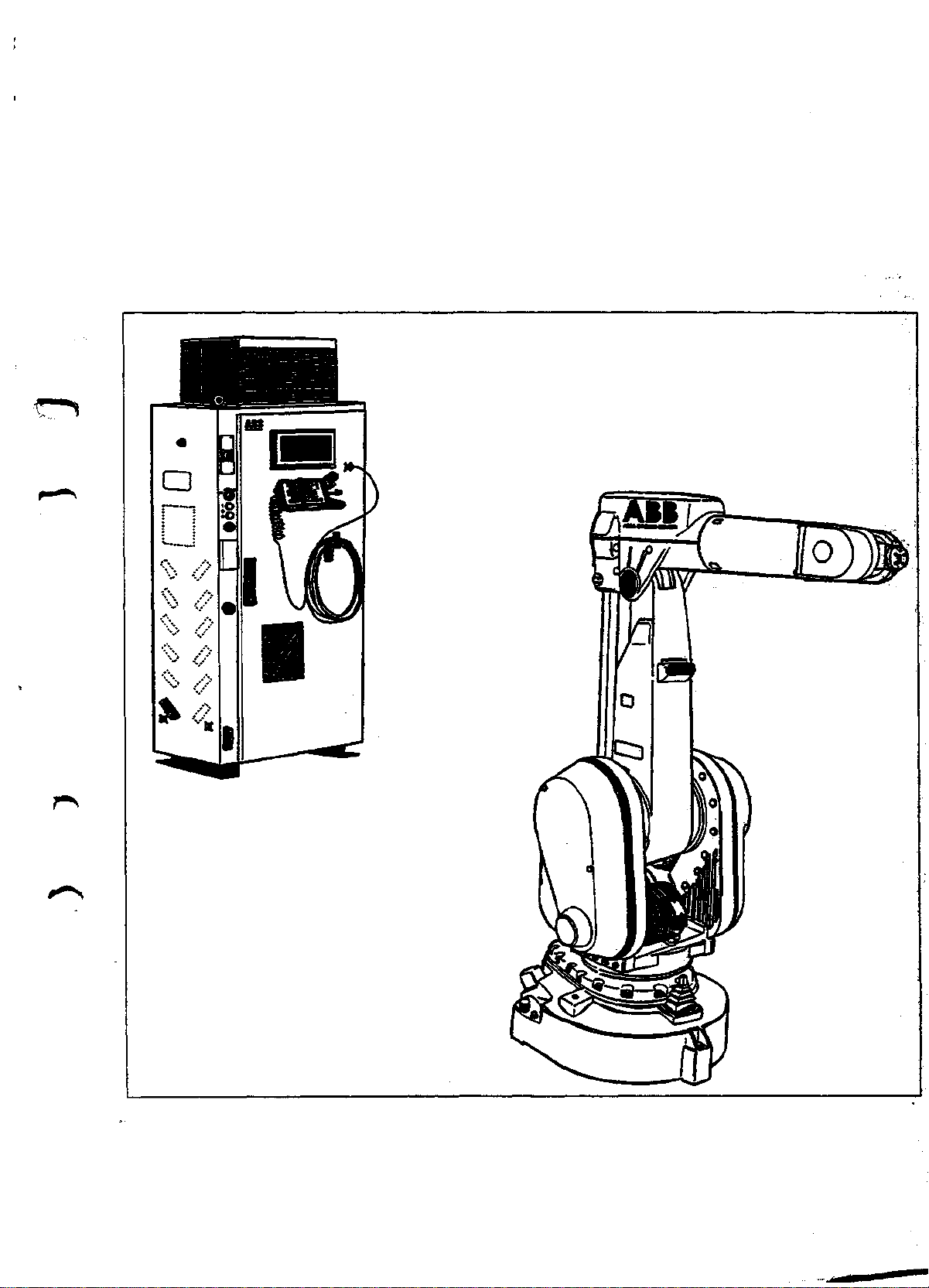
INTRODUCTION
1KB2000
isa six-axesrobotwitha largeworkvolumeandisprimarilyintendedforarc
weldingandglueing/sealing.IRB2000isalsosuitableforapplicationssuchas
assembly,waterjetcutting,lasercutting,materialhandlingandstudwelding.
Thehandlingcapacityis10kgandtheveryquickmovementsofthewristaxesare
otherimportantfeaturesfortheintendedapplications.
Tomakeitpossibletoadapttherobottovariousapplications,a rangeofperipheral
equipmentforvariousapplicationsisavailable.Theperipheralequipmentrange
includestoolexchangers,gripperholdersandseveraldifferentgripperunits.
Powerandairsupplyisavailableatthegrippers.
Description1KB2000