Contents
Disclaimer................................................................................................................................................................................................................ 2
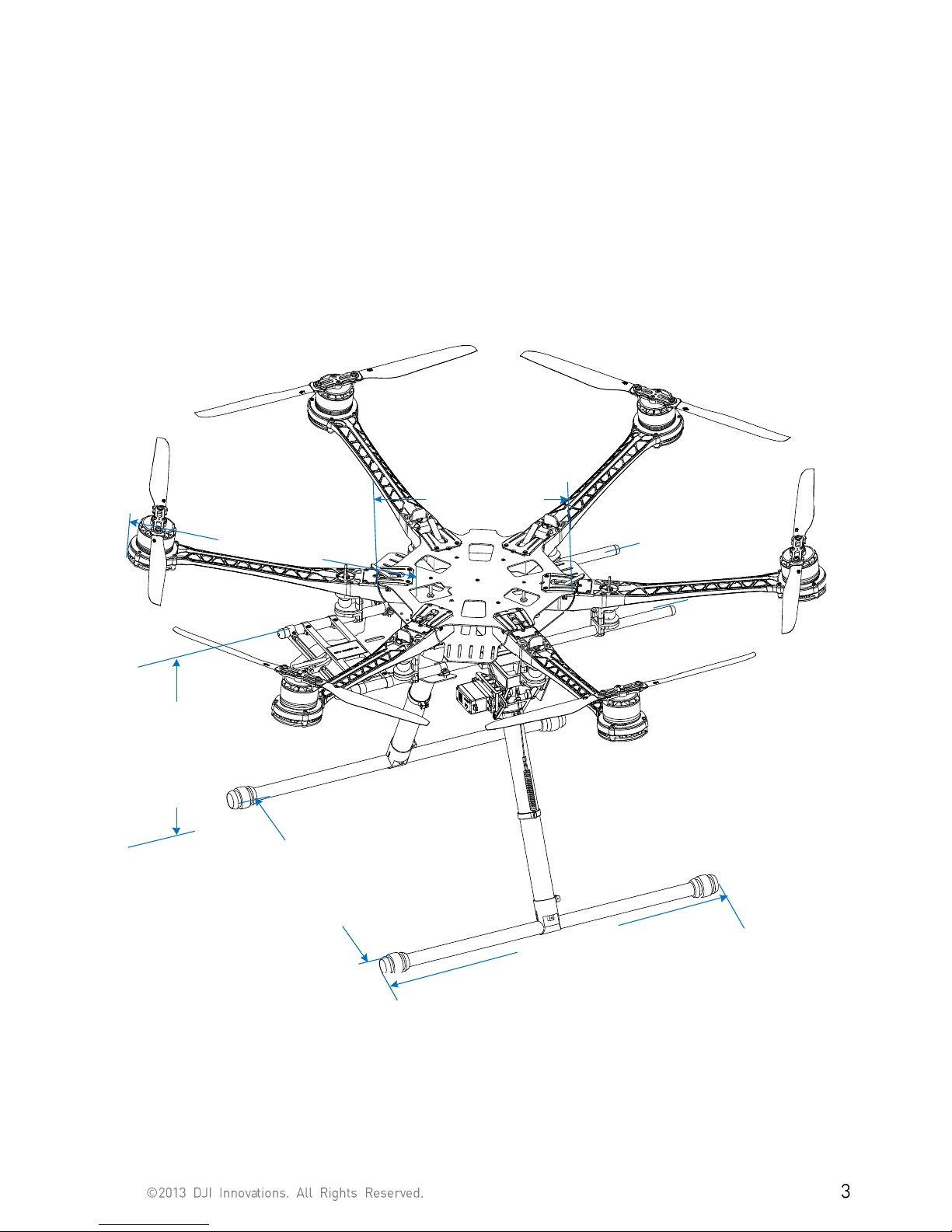
Profile....................................................................................................................................................................................................................... 3
Contents.................................................................................................................................................................................................................. 4
Product Usage Cautions ................................................................................................................................................................................... 5
In The Box............................................................................................................................................................................................................... 6
Tools Needed ........................................................................................................................................................................................................ 6
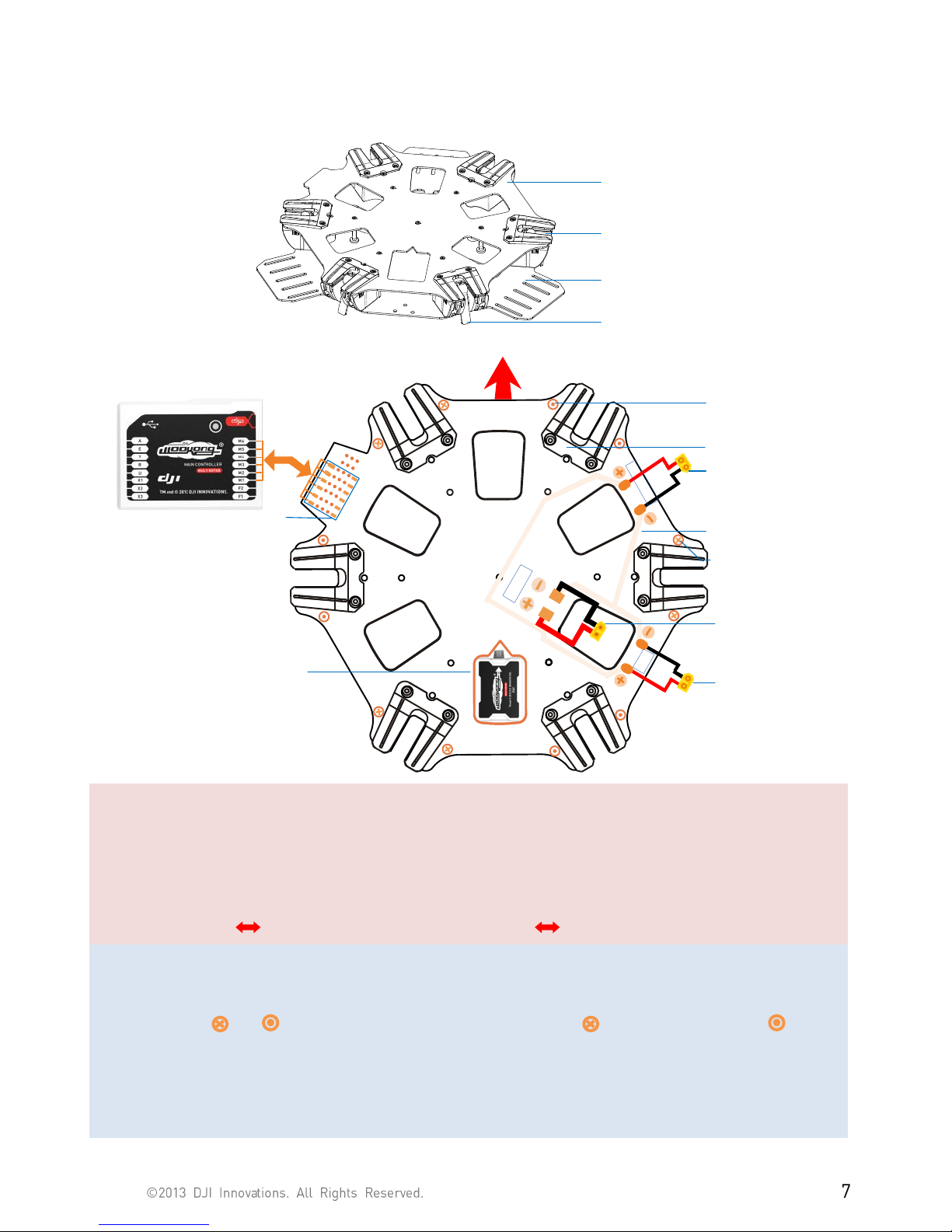
Center Frame Wiring ......................................................................................................................................................................................... 7
Attach Electric Equipment to Center Frame............................................................................................................................................. 8
Mount Frame Arms............................................................................................................................................................................................ 10
Mount Landing Gear..........................................................................................................................................................................................12
1 Assembly & Connection.......................................................................................................................................................................12
2 Travel Calibration..................................................................................................................................................................................13
3 Transmitter Setting...............................................................................................................................................................................14
4 Usage .........................................................................................................................................................................................................14
5 Mount Battery Bracket........................................................................................................................................................................16
Assembly ................................................................................................................................................................................................................17
Install the IMU Mount (Optional) ..................................................................................................................................................................18
Appendix................................................................................................................................................................................................................19
ESC Sound...................................................................................................................................................................................................19
ESC LED.......................................................................................................................................................................................................19
Specifications............................................................................................................................................................................................ 20
FAQ (Trouble Shooting)...................................................................................................................................................................................21
Solder ESC...................................................................................................................................................................................................21
Assemble the Vibration Absorber of Motors..................................................................................................................................21
Spare Parts Listing.............................................................................................................................................................................................22