External
Switch
INPUT:DC 7.4-26V
External
Switch
INPUT:DC 7.4-26V
Add:
F-4,Building
C,
Zhongxiu
Technology
Park,
No.3
Yuanxi
Road,
Wuxi,
214125,
Jiangsu,
China
Technical
Support:
[email protected] Instruction Manual for FrSky RB-35 & RB-35S
Version
1.0
Introduction
The RB-35/RB-35S builds on the success of the previous trusted Redundancy Bus series by adding many new
features, such as configurable dual power input, dual BEC outputs, overload / current detection, the new ADV
stabilizer (RB-35S), etc. The RB-35/RB-35S system has been designed to meet the needs of users who want the
ultimate flight-safe performance and safety for their RC Models.
Triple Receiver Redundancy & Dual Power Input
RB-35/RB-35S has been designed to offer both dual-power and triple-receiver redundancy. This provides the user
triple receiver signal and telemetry redundancy by adding multiplex ports (RX1-3 IN / S.Port). Dual-power provides a
safe and efficient way to power the system with your power sources connected via a pair of standard XT30
connections.
The dual-power consumption system can operate either in Balance or Backup mode. In Balance Mode (default), it
consumes the power line from either power source depending on which has the higher voltage. When switching to the
Backup Mode, the system consumes the power line with the priority that the user selected under the set voltage range.
Dual BEC Outputs & Overload Protection & Current Detection
The RB-35/RB-35S includes a built-in Dual BEC, each XT30 output port can be independently configured to provide
between 5V to 8.4V output. The unit's BEC also can change channel output voltage for ports uses BEC1- VOut1 and
Channels 1-9, and BEC2 - VOut2 and all other Channels and ports. All Channel ports are provided with overload
protection, and in addition, Channels 1-9 support the current detection function.
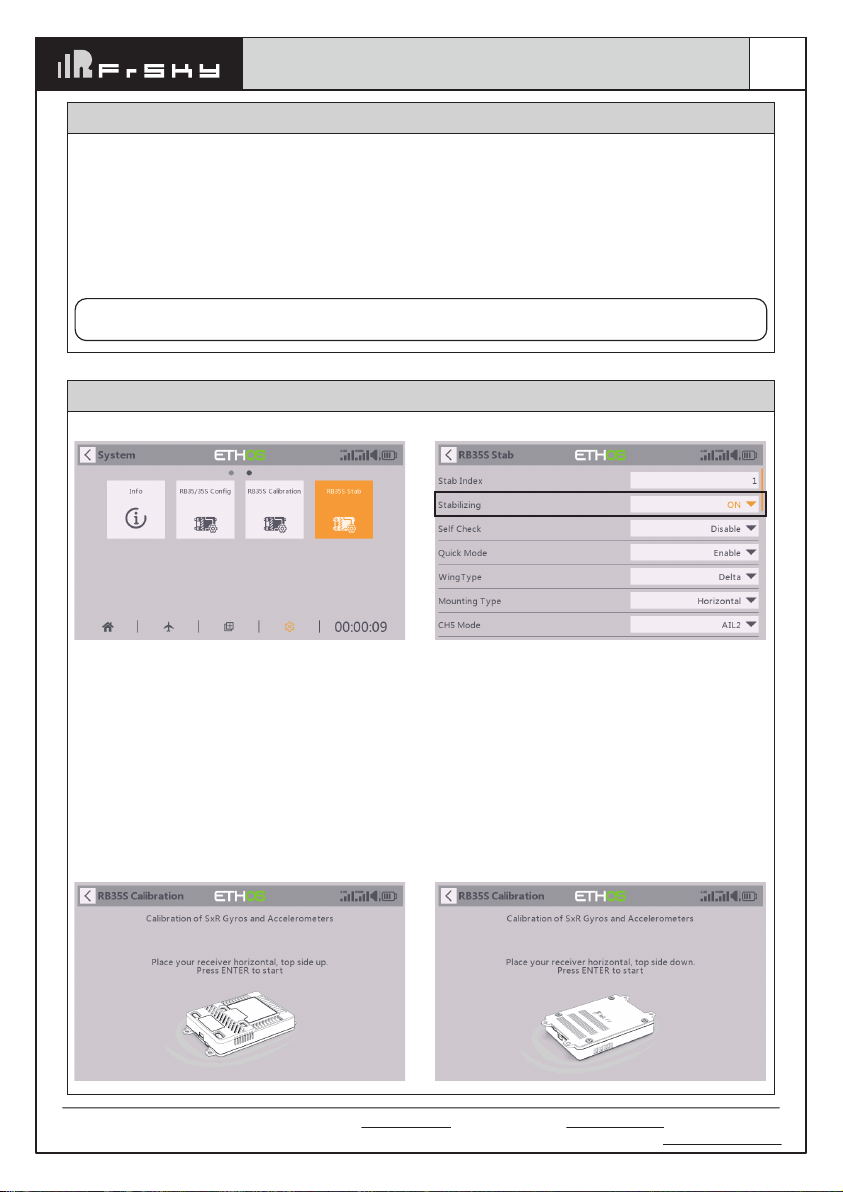
Advanced Stabilizer (RB-35S)
The RB-35S offers an ADV Stabilizer function which is an upgrade over the original classical gyroscope stabilization
modes. The ADV Stabilizer offers an advanced mode that provides more programmable stabilized channels and
flexibility.
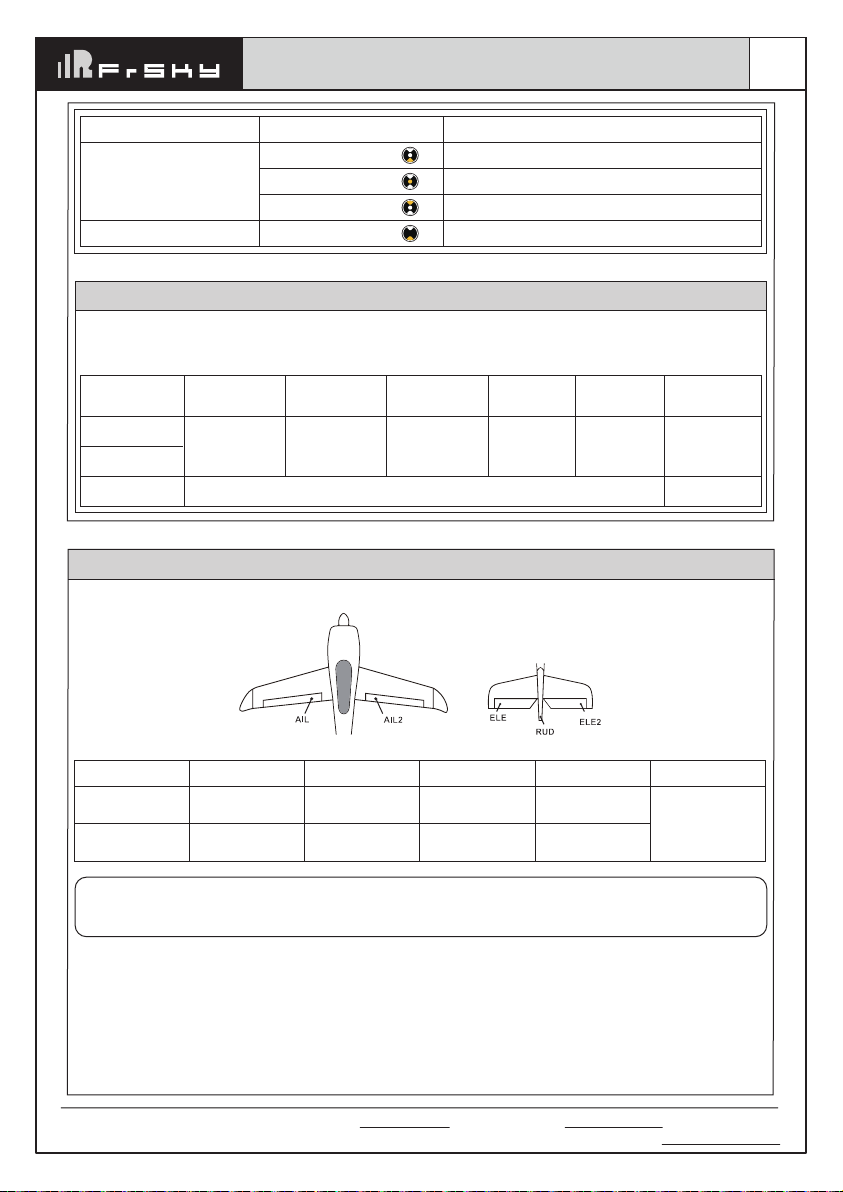
The classic stabilization mode has been enhanced with 5 additional stabilization channels, providing pin mapping to
each channel in the multiple flight modes like Stabilization, Auto-Level, Hover, and Knife-Edge with an airplane model.
In the advanced stabilization mode, all the RB-35S output pins are configurable for stabilization and additional
advanced features such as File Sharing, Programmable Parameters, Developer Access, etc.
Diversified Sensor Telemetry
The RB-35/RB-35S also works as an extensive sensor module. It has various built-in sensors including diversified
telemetry. The RB-35S includes high-precision telemetry sensors for monitoring altitude, vertical speed, etc. It can be
used as an alternative to using a GR or S series receiver.
Power Switch Function
The built-in power switch function draws the support of using multiple types of external switches (e.g. NFC switch, Pin
Plug, etc.) that enable flexible options on how the power can be switched on/off without the need to plug/unplug the
battery connections.
SwitchGNDVOUT
Overview
114.4mm
18.7mm 73.4mm
Note: The preset voltage (sync with corresponding
BEC VOut line) for the channel ports cannot
be higher than the voltage the powered device
can capable of.
Sync with the VOut1
BEC voltage setting.
Sync with the VOut2
BEC voltage setting.