Everest XCR - Product Manual|Product Description
4. Product Description
PRELIMINARY
Everest XCR is a compact, smart digital servo drive. Thanks to its small size and rugged design it can be mounted
virtually anywhere: collaborative robot joints, wearable robots, unmanned ground or aerial vehicles as well as
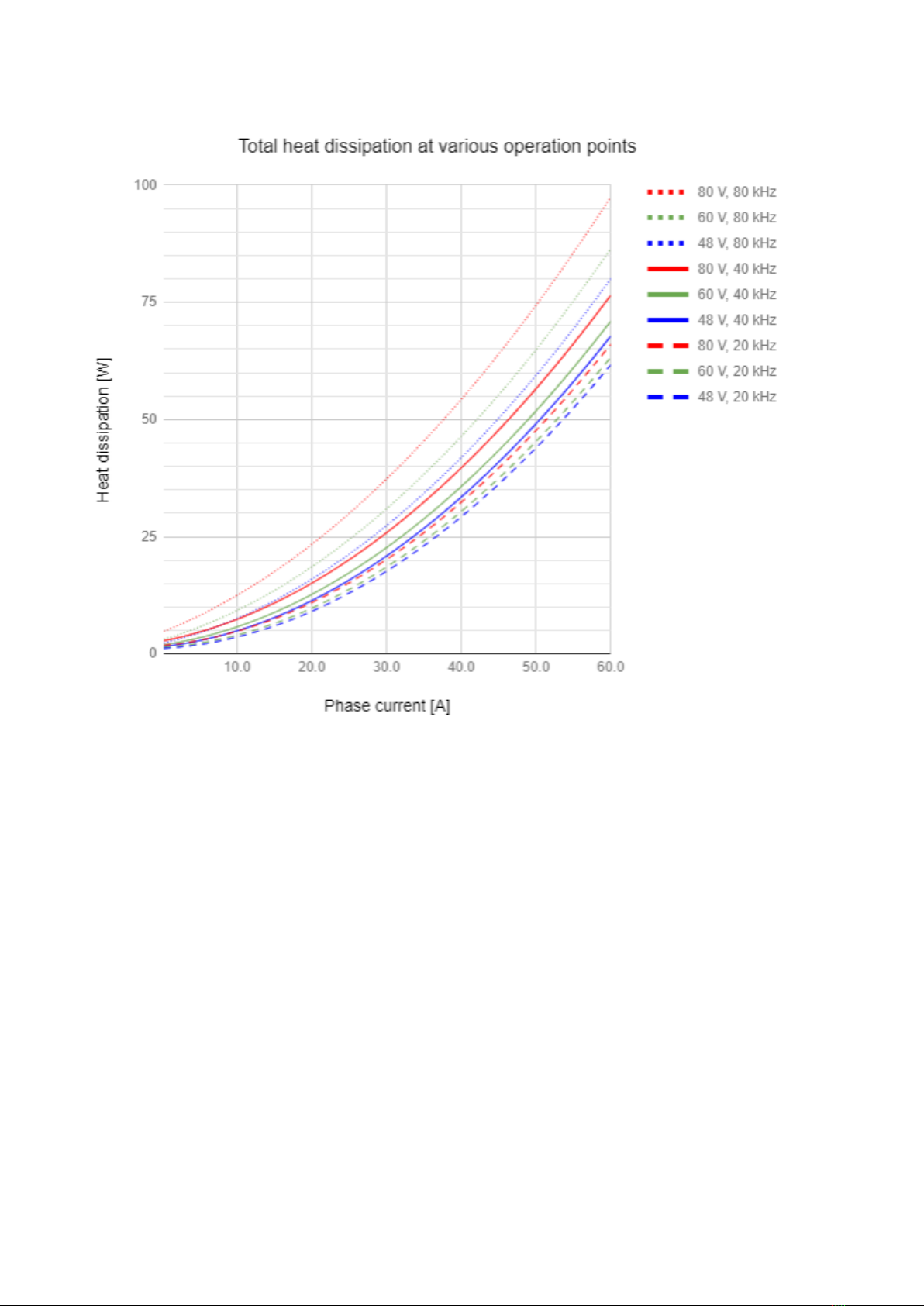
inside motors. The drive features best in class energy efficiency thanks to the latest GAN technology. At 30 ARMS (42
A amplitude) 80 VDC it generates just 20 W of total heat dissipation exceeding by far any comparable servo drive.
The standby power losses of Everest XCR are minimal, even using EtherCAT, the consumption is less than 2.5 W.
Everest will save energy on your project and provide longer battery times.
The control loops have sampling times that exceed the electrical and mechanical time constants of almost any
motor.Up to 14 µs(75 kHz)current loop and 40 µs(25 kHz) position and velocity loops.The bandwidth of the
control system will only be limited by the physical limits of the system and the feedback. Configurable digital filters
offer extra flexibility. In addition, control algorithms can be programmed and executed real time on the drive.
Power stage PWM frequency can be adapted to each application, with a minimum 10 kHz for low electrical noise
and power losses and a maximum of 100 kHz for low inductance motors. Current gain can also be configured on 4
different ranges allowing the same drive and part number to used for various motor sizes and thus simplifying
stocking and complexity in your application.
The Everest XCR can close loops with a Digital Incremental Encoder, Dual BiSS-Cencoder and Digital
Halls.Everything can be easily configured with the new INGENIA MotionLab 3.
Everest XCR include compliant EtherCAT & CANopen communication. The drive can be accessed from a standard
EtherNET port for configuration.
The Everest XCR can be operated with a single power supply on its full operating range and includes an additional
logic supply up to 50 V. It includes 4 digital inputs and 4 digital outputs, a dedicated brake output, motor
temperature sensing input and a 16 bit ±10 V analog input to interface with load cells and torque meters.
The driver has built-in safety torque off (STO) and includes several safety protections to protect against most issues
like short-circuits, temperature and voltage based current foldback, overtemperature, overvoltage, and has
industry grade EMC and ESD inmunity.
PRELIMINARY
4.1. Everest XCR part numbering
Everest XCR is available on a single part number. Rated at 30 ARMS continuous current and an operation voltage
between 8 VDC to 85 VDC. Variable gain current sense amplifier and 16 bit ADC allow controlling low current motors.