TECHNICAL MANUAL Drive 2000 Mini Evo
October 2016-Rev. 1 3
1. Introduction
The servo-amplifiers series 2000 Mini are intended for the control of 3 phases brushless
servo-motors and asynchronous servo-motors.
The motors regulated by the series 2000 Mini servo-amplifiers should have the following
characteristics:
Rotor constructed with permanent magnets or winding cage arranged in 1, 2, 3, 4,
5 or 6 pole pairs, without commutator.
Stator constructed with 3 windings connected in star or delta.
Brushless motors: electronic commutation is performed by means of a feedback
type:
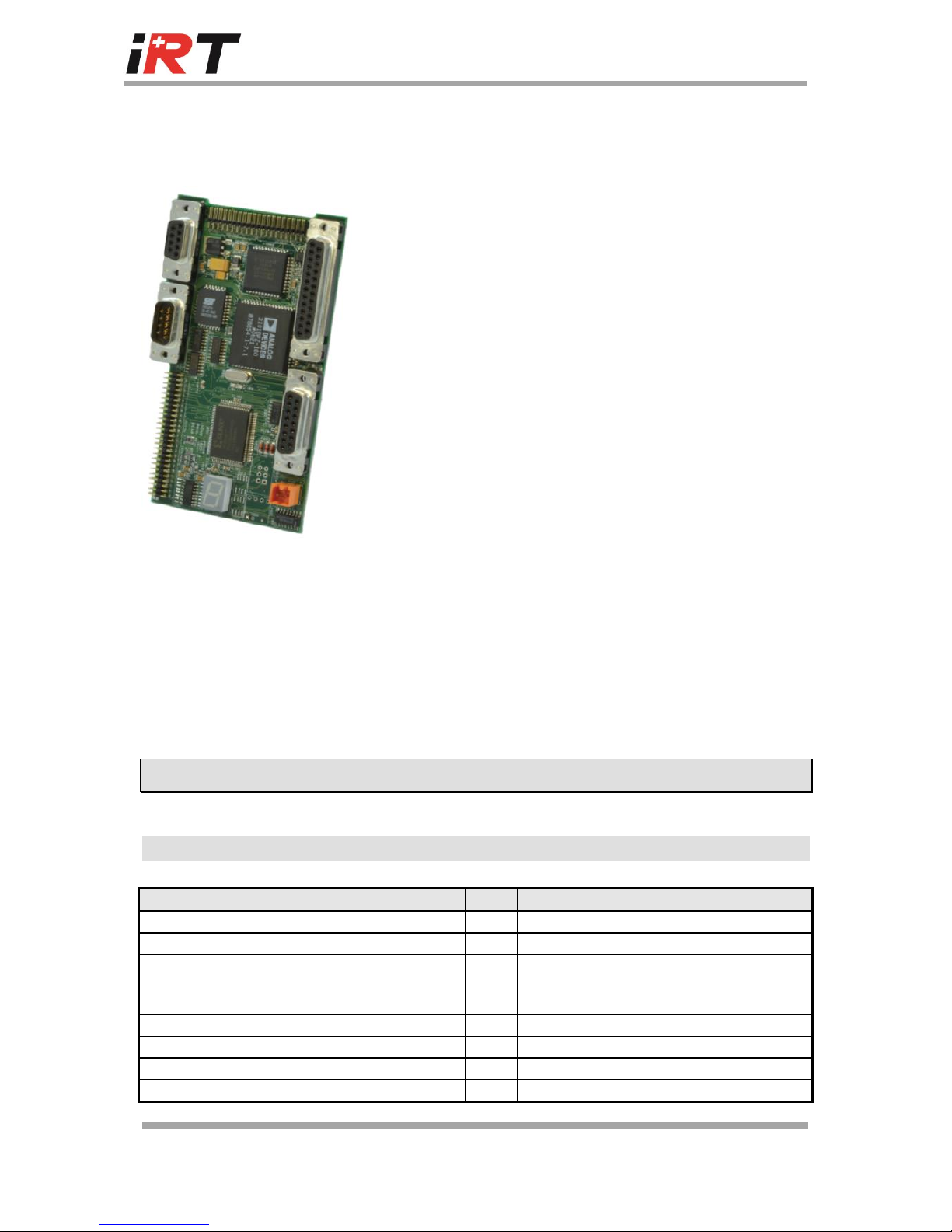
With control unit 2001
Speed one resolver
Incremental encoder with U, V and W signals
With control unit 2002
Absolute encoder SinCos Hiperface® compatible
EnDat 2.1
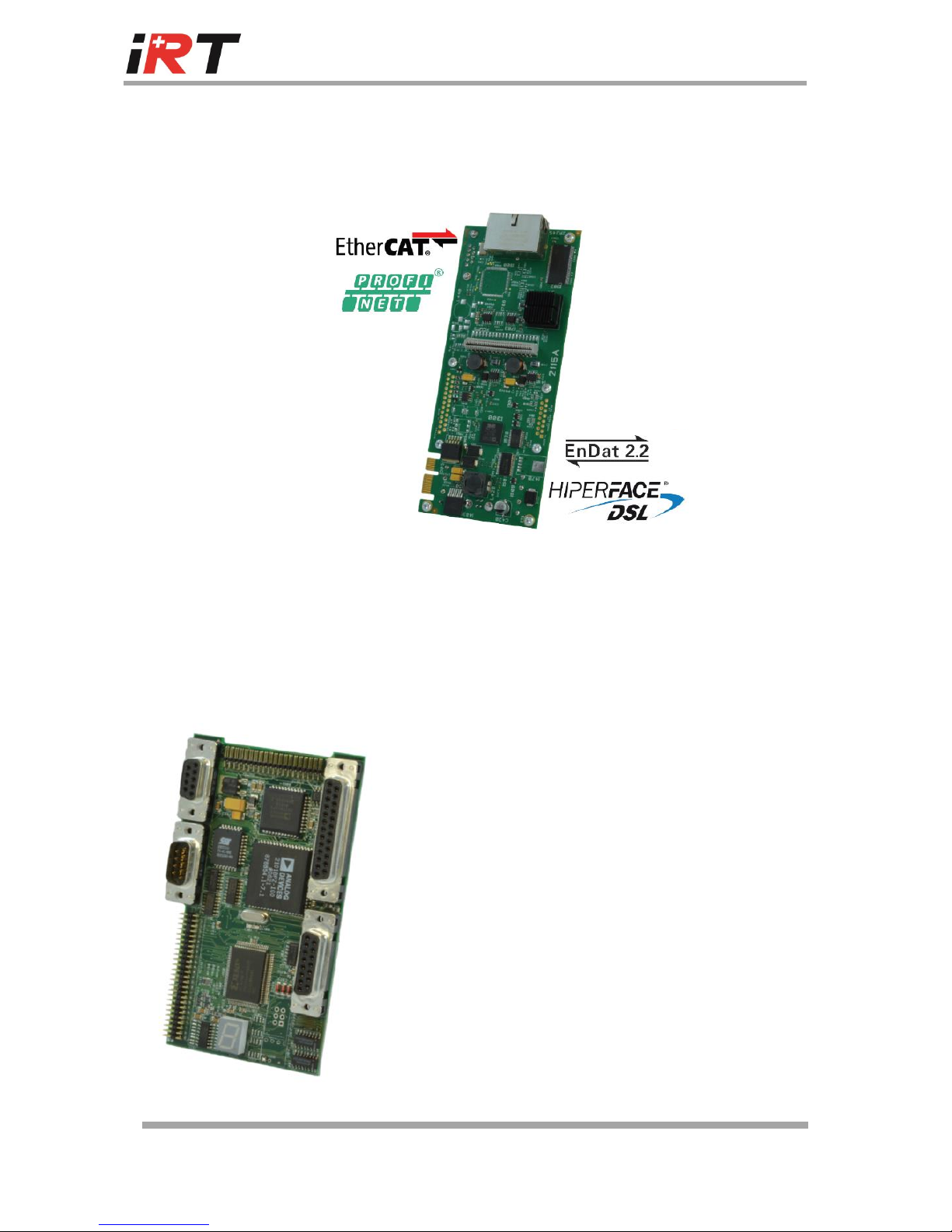
With control unit 2115
Speed one resolver
EnDat 2.1 / 2.2
Hiperface® DSL (single cable solution)
Asynchronous motors: electronic commutation is only performed by means of a
feedback type:
Speed one resolver
Incremental encoder.
Motors with Hall effect sensors and tachogenerator are not suitable.
The servo-amplifiers 2004 MiniEvoultion are fully digital. High-performance torque, speed
and positioning control fulfils all requirements for rapid response and control accuracy.