Copyright IXXAT Automation GmbH CAN@net II - Manual, V1.4
Contents
3
1Introduction ..............................................................................5
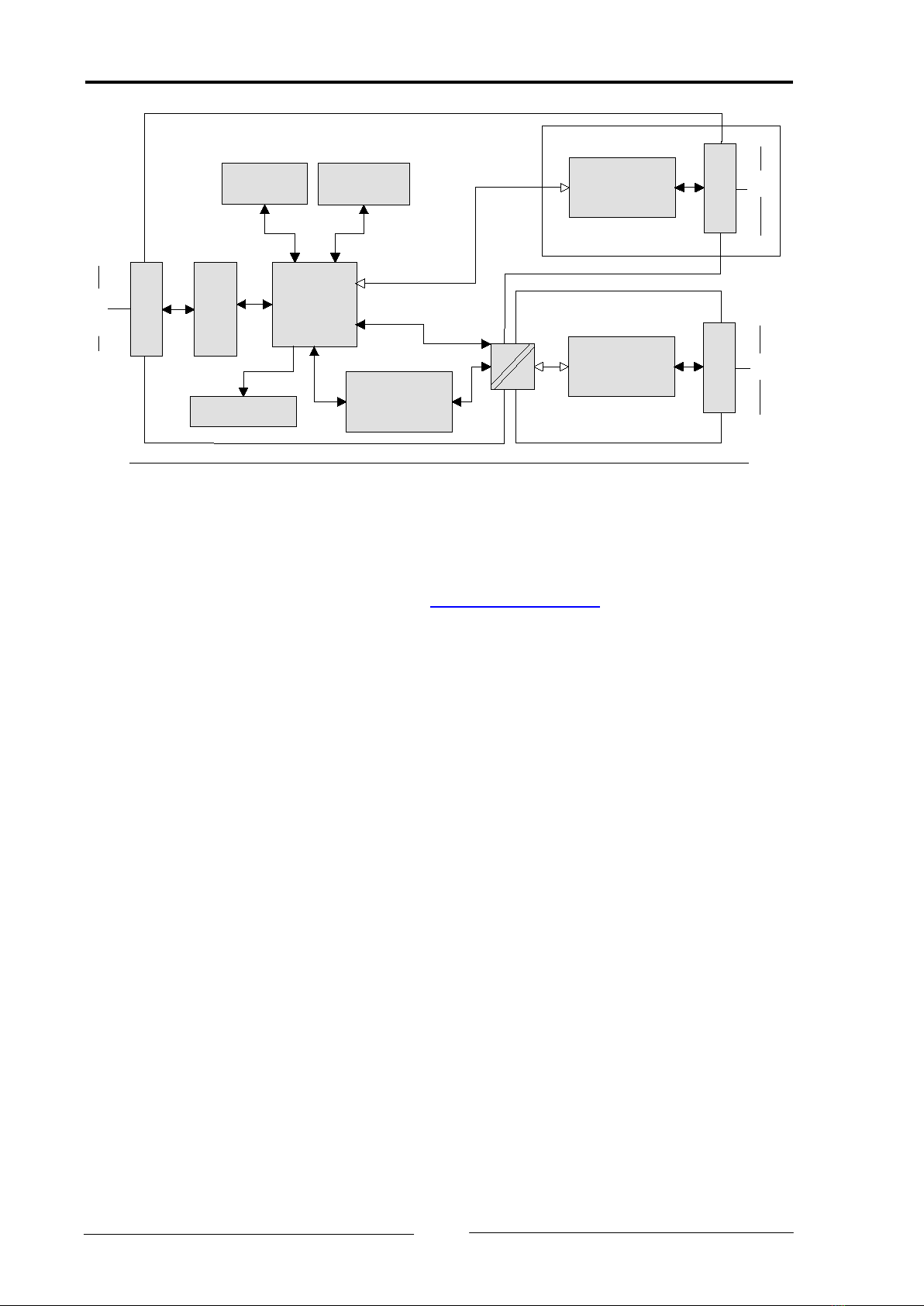
1.1 Overview .............................................................................5
1.2 Features ..............................................................................5
1.3 Support...............................................................................6
1.4 Returning hardware............................................................6
2Installation.................................................................................7
2.1 Software installation ..........................................................7
2.2 Hardware installation .........................................................7
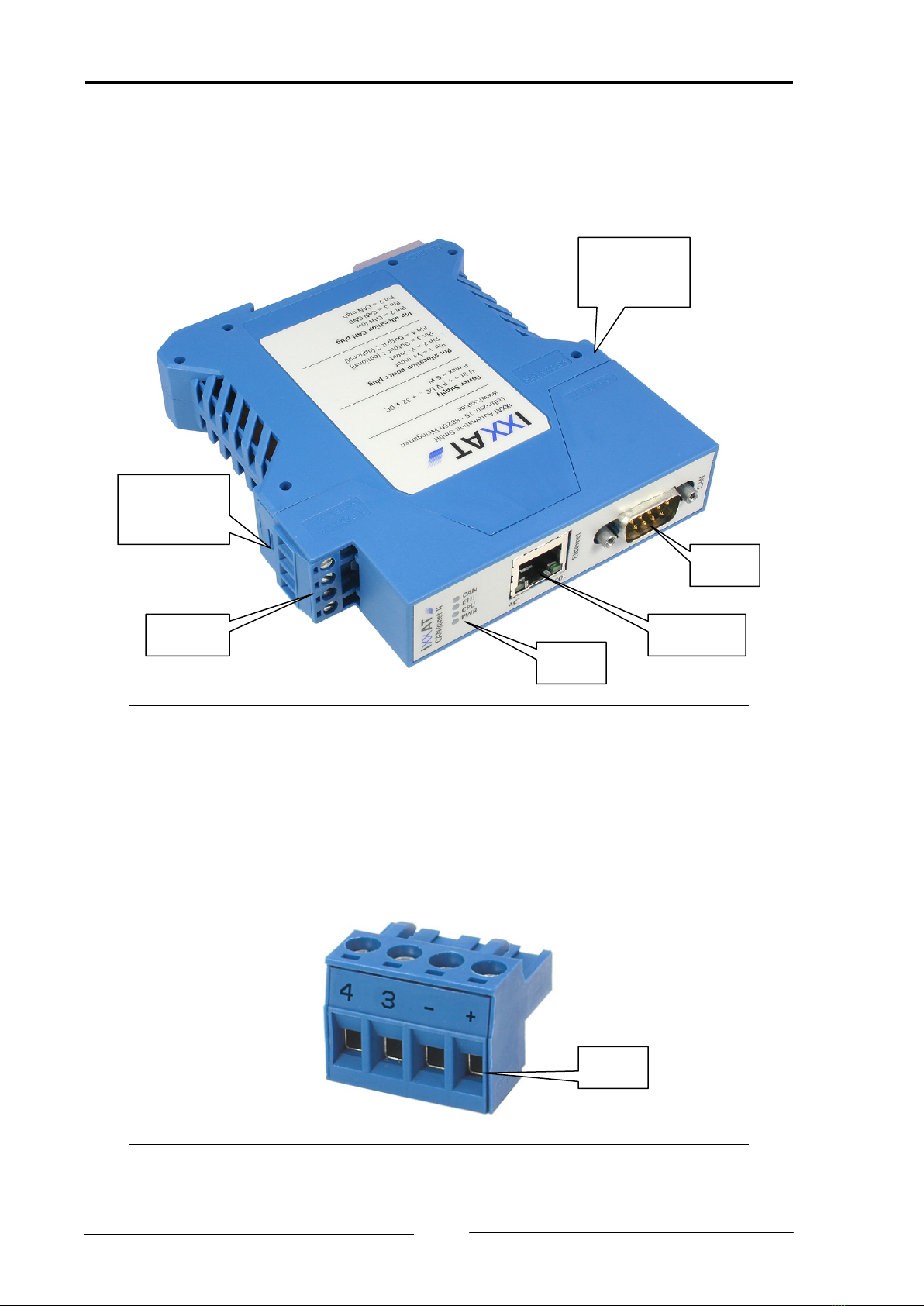
3Connections and indicators.......................................................8
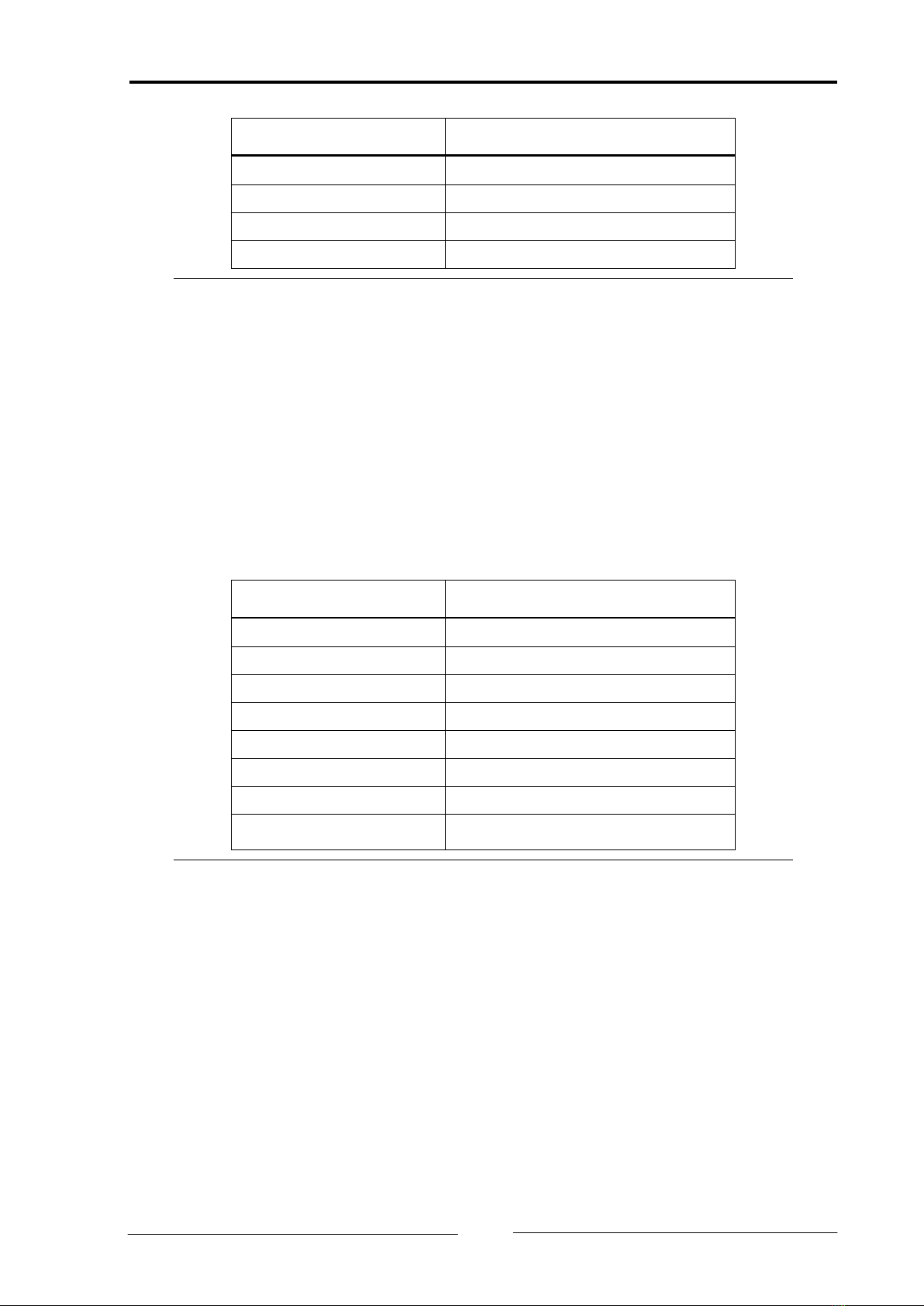
3.1 Pin allocation ......................................................................8
3.1.1 Power connector ....................................................................... 8
3.1.2 Ethernet socket.......................................................................... 9
3.1.3 CAN bus connector ................................................................. 10
3.2 Indicators..........................................................................10
3.2.1 Power LED (PWR)..................................................................... 11
3.2.2 Status LED (CPU)...................................................................... 11
3.2.3 Ethernet LED (ETH) .................................................................. 12
3.2.4 Collision LED (COL) .................................................................. 12
3.2.5 Link/Data Activity LED (ACT)..................................................... 13
3.2.6 CAN LED (CAN)........................................................................ 13
3.3 CAN bus termination ........................................................14
4Configuration ..........................................................................14
4.1 Configuration Tool ............................................................14
4.1.1 Overview ................................................................................. 14
4.1.2 Usage...................................................................................... 15
4.2 Resetting the network parameters ...................................15
5Appendix .................................................................................17
5.1 Technical specifications.....................................................17
5.2 Default Network Settings .................................................18
5.3 Accessories........................................................................18
5.3.1 CAN bus termination resistor ................................................... 18
5.4 Notes on EMC ...................................................................19
Declaration of conformity .......................................................20
FCC Compliance.......................................................................21