Contents
1Introduction................................................................................5
1.1 Overview ............................................................................. 5
1.2 Performance features ......................................................... 5
1.3 Block diagram ..................................................................... 6
1.4 Support ............................................................................... 7
1.5 Returning hardware............................................................ 7
2Installation ..................................................................................8
2.1 Software installation .......................................................... 8
2.2 Hardware installation ......................................................... 8
3Configuration .............................................................................9
3.1 Memory range/Interrupt ..................................................... 9
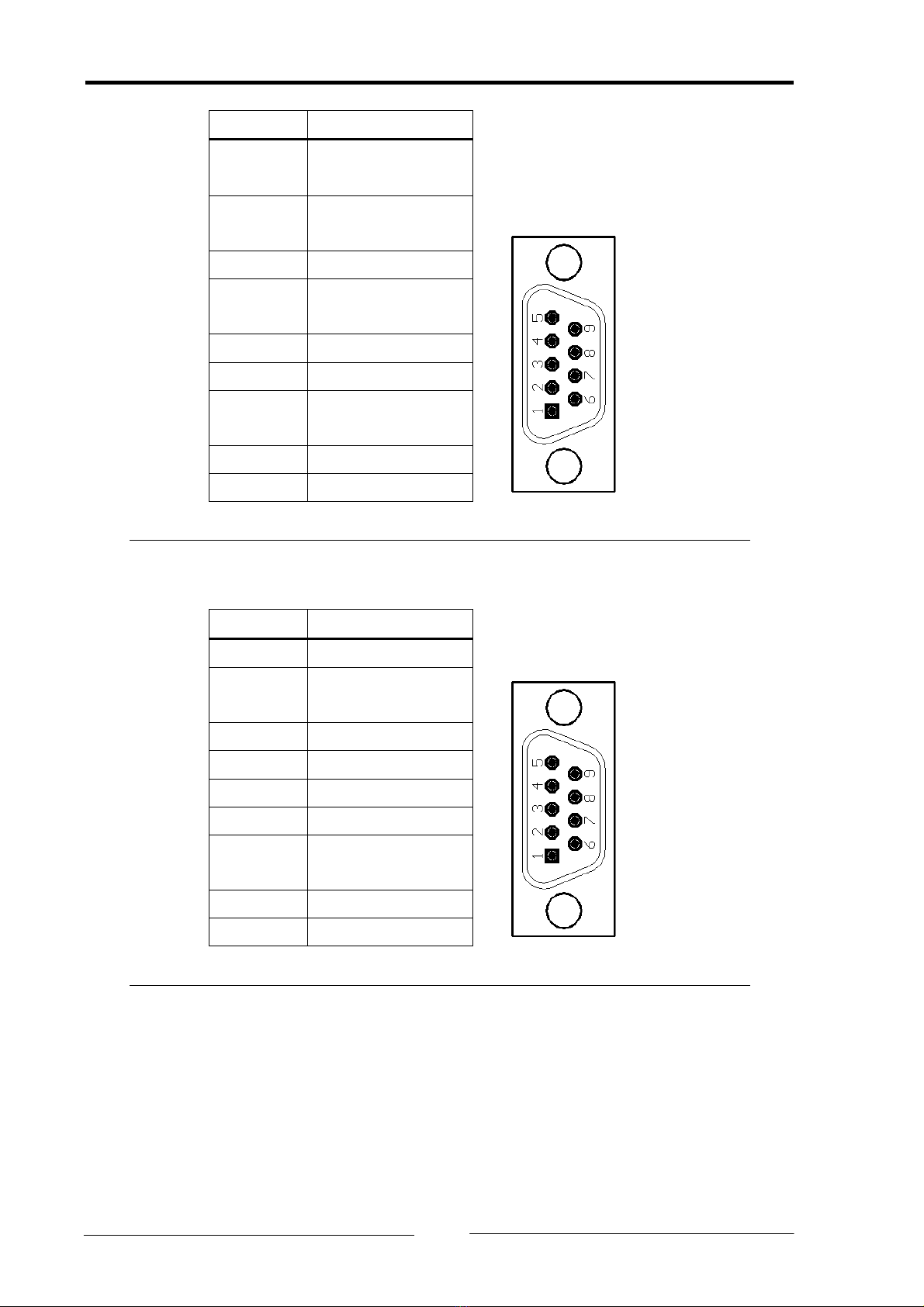
3.2 CAN bus interface ............................................................... 9
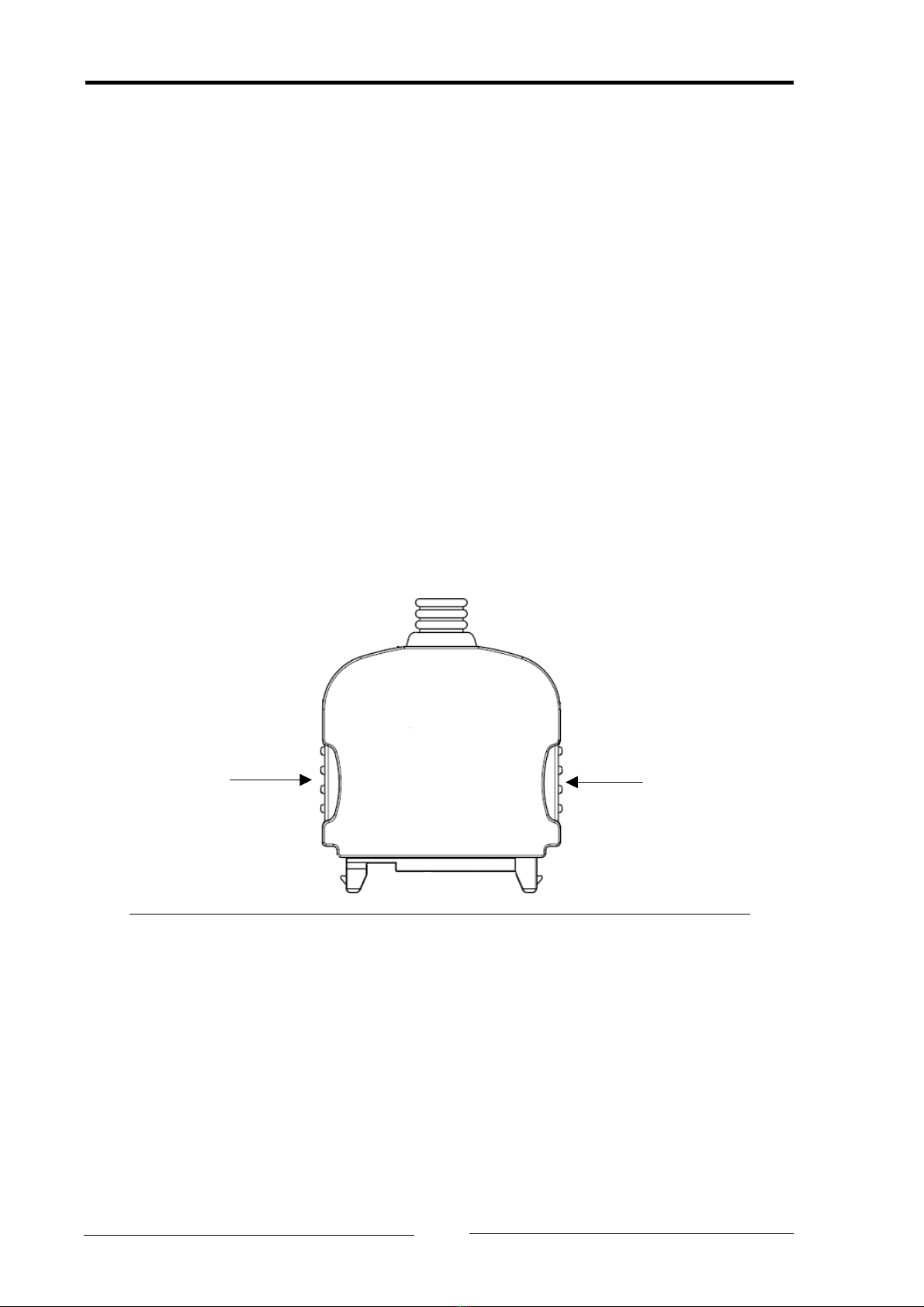
4Status LEDs ...............................................................................11
4.1 Bootloader ........................................................................ 11
4.2 Standard mode (with IXXAT VCI driver) ........................... 11
4.2.1 CAN1 / CAN2 LED...................................................................11
4.2.2 Low speed LED .......................................................................11
Appendix..........................................................................................12
Technical specifications............................................................ 12
EC declaration of conformity .................................................. 13
Copyright IXXAT Automation GmbH tinCAN161 - Manual, Version 1.4
3