6. LED blinkt. Es erklingt ein ansteigender
Dreiklangton als Einschaltbestätigung und
anschließend Einzeltöne für die erkannte
Zellenzahl (siehe dazu auch 4.1).
7. Den Taster betätigen. Es erklingt ein
absteigender Dreiklangton, die LED blinkt 1
Mal.
8. Der KOLIBRI beginnt die Modi auszugeben,
je Modus die entsprechende Anzahl
Einzeltöne, die LED blinkt entsprechend der
Anzahl Modustöne.
9. Nach dem 4. Einzelton ist Modus 4 erreicht,
den Schalter auf Vollgas (100%) stellen. Der
KOLIBRI bestätigt die Vollgasposition mit
einem ansteigenden Dreiklang und danach
den Modus mit 4 Einzeltönen.
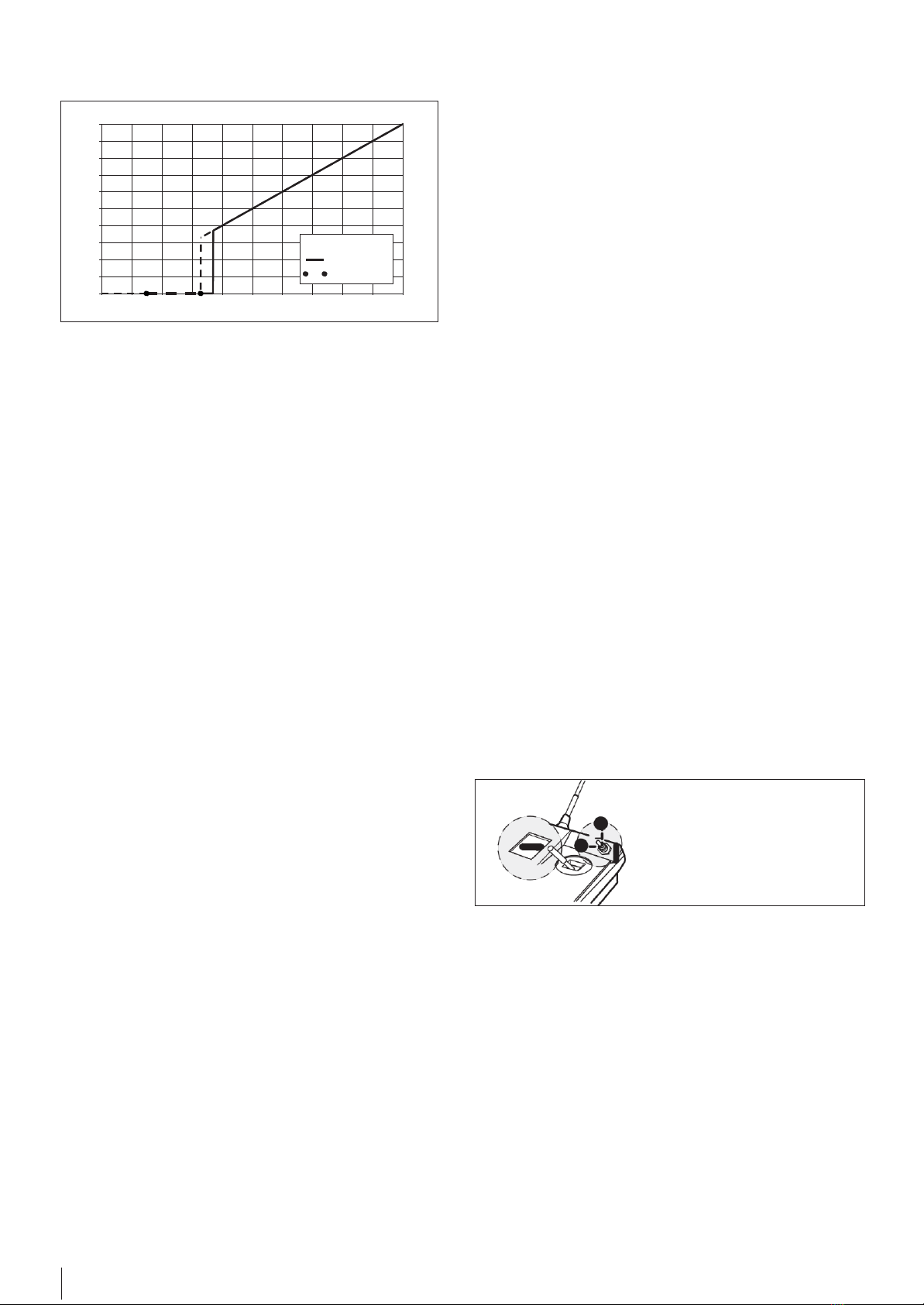
2. Position
= 100% =Vollgas
1. Nach Ausgabe der
Mo
d
us
b
e
s
t
ä
t
igung ca. 2 s
warten und
d
e
n Regler vom Akku trennen.
Vor dem Trennen des Reglers vom Akku
unbedingt die Modusbestätigung
a
b
wa
r
t
e
n
(Schritt 8), da der Regler sonst eine nicht
abgeschlossene Programmierung
e
r
ke
nn
t
und gesperrt wird. Auf eventuelle Ausgabe
der Warnmeldung 9-fach Blinken achten
!
Achtung:
Nach abgebrochener
A
u
t
oro
t
a
tion
ergeben sich durch das schnelle
Hochfahren hohe Belastungen für die
M
e
chanik. Hauptrotorblätter fest anziehen.
In Modus 4 mit AR f
li
e
g
e
n
:
Sender für Flug vorbereiten (siehe 3.1). Durch die
Autorotations-Schnellanlauf-Funktion läuft der
Motor nach einer abgebrochenen oder
missglückten Autorotation in deutlich kürzerer
Zeit wieder an und bringt den Rotor schneller auf
Drehzahl (siehe 4.10). Dadurch sindunvermittelte
Abfangmanöver möglich.
Die Hochlaufzeit ist dabei von der zu
beschleunigenden Masse abhängig und stellt
sich automatisch auf die aktuellen
Gegebenheiten ein. Dadurch steht immer der
schnellstmögliche Anlauf zur Verfügung ohne
dabei die Mechanik zu überlasten.
Der Motor wird bei Aktivierung der AR ohne
Verzögerung abgeschaltet. Sollte die
Autorotation unterbrochen und der Motor wieder
eingeschaltet werden, fährt der KOLIBRI die
Drehzahl im Schnellanlauf wieder auf die zuvor
angewählte Drehzahl hoch.
Bleibt der Schalter länger als 90 s in der
Autorotationsposition, wird beim erneuten Hoch-
fahren der Drehzahl wieder der Sanftanlauf
aktiviert.
7.5 Modus 6 - Vorwärts / Rückwärts
Der Vorwärts / Rückwärts-Modus ermöglicht es,
den Motor im Betrieb vorwärts und rückwärts
laufen zu lassen. (Voreinstellung: aus, über
Programmiereinheit einschaltbar).
Das Ansprechverhalten ist werkseitig auf einen
Mittelwert programmiert. Es kann mittels
Programmiereinheit von „schnell“ bis „träge“
verändert werden. Der Modus 6 arbeitet im
Stellerbetrieb. Die Unterspannungsabregelung
regelt, wenn die eingestellte Akkuentladespannung
erreicht ist den Motor ab (siehe 3.4). Die im Modus
6 integrierte Bremse (EMK-Bremse) arbeitet mit
proportional ansteigender Kraft (d.h. die
Bremsstärke ist drehzahlabhängig).
Die Motor-Aus-Position befindet sich in der
Neutralstellung des Knüppelweges (Mittelstellung).
Die am Sender definierte Vollgasrichtung gibt
Vorwärts, die Gegenrichtung Rückwärts vor. Die
Knüppelstellung wird vom KOLIBRI automatisch
erkannt.
Modus 6 progr
a
mm
i
e
r
e
n
:
1. Sender einschalten und vorbereiten (wie ab
3.1 beschrieben). Gasknüppel auf Stellung
„Motor-Aus“ (0%) stellen.
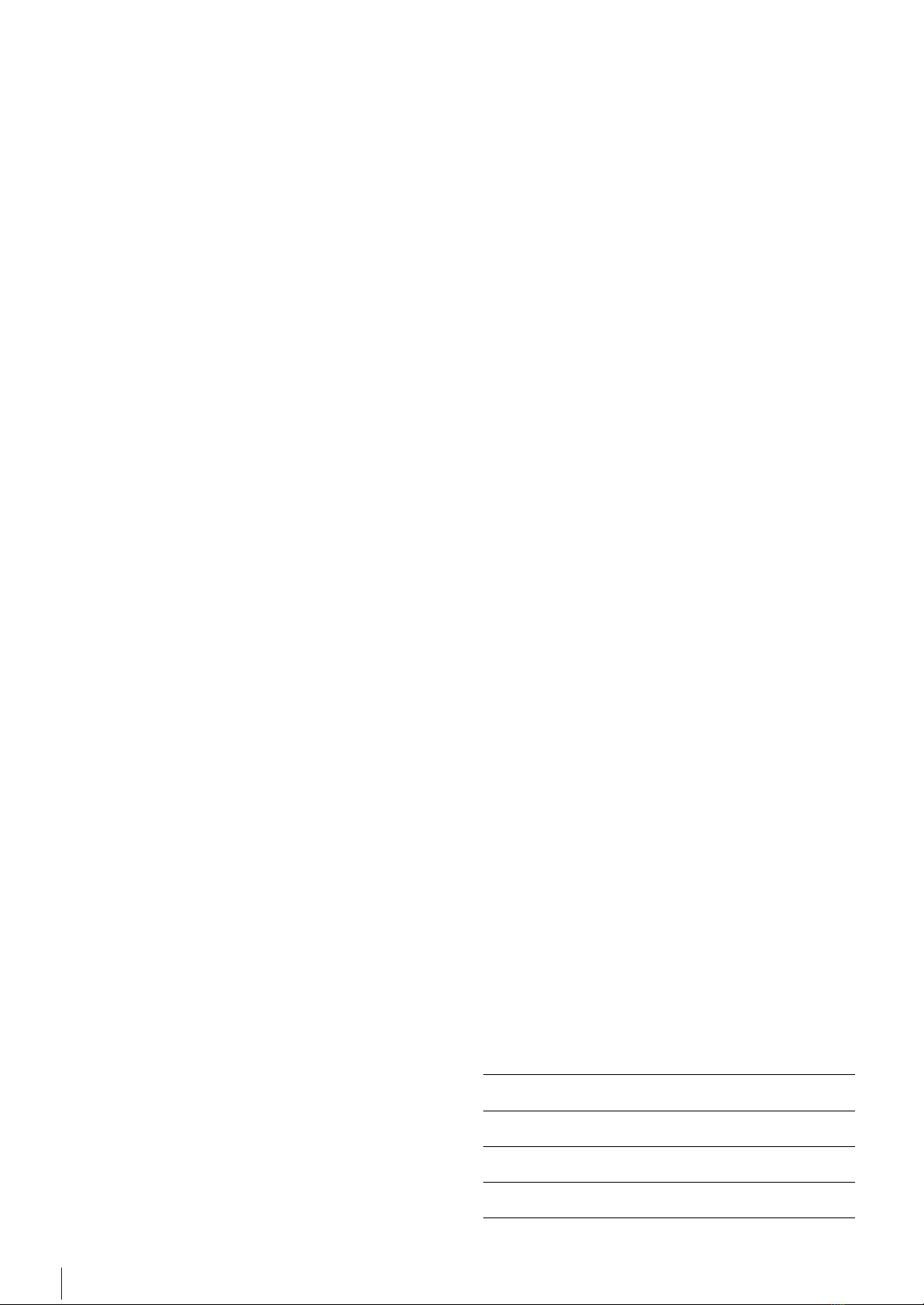
2. Den KOLIBRI mit dem Empfänger-
Gasausgang (Masterkabel) verbinden.
3. Motorkabel mit dem Motor verbinden.
4. Antriebsakku anschließen.
5. LED blinkt. Es erklingt ein ansteigender
Dreiklangton als Einschaltbestätigung und
anschließend Einzeltöne für die erkannte
Zellenzahl (siehe 4.1).
6. Den Taster betätigen. Es erklingt ein
absteigender Dreiklangton, die LED blinkt 1
Mal.
7. Der KOLIBRI beginnt die Modi auszugeben, je
Modus die entsprechende Anzahl Einzeltöne,
die LED blinkt entsprechend der Anzahl
Modustöne.
8. Nach dem 6. Einzelton ist Modus 6 erreicht,
den Gashebel auf Vollgas (100%) stellen. Der
KOLIBRI bestätigt die Gasposition mit einem
Bestätigungston. Danach den Gashebel in
Rückwärtsposition (0%) stellen, der KOLIBRI
bestätigt mit einem ansteigenden Dreiklang
und den Modus mit 6 Einzeltönen.