Deutsch
GEL 244 3
1. Sicherheitshinweise
Obwohl der MiniCoder sehr robust ist, muss darauf geachtet werden, dass die Sensor-
elemente unterhalb der Sensorfläche nicht beschädigt werden. Der MiniCoder wird mit
einer Schutzabdeckung für den Transport geliefert. Entfernen Sie diese erst kurz vor
Einbau des Sensors. Wenn der MiniCoder zu Inspektions- oder Ausbesserungs-
zwecken ausgebaut werden muss, Schutzabdeckung sofort wieder aufstecken.
Der MiniCoder enthält Magnete. Bei der Annäherung an metallische Gegenstände ist
deshalb darauf zu achten, dass sich diese und der Sensor nicht gegenseitig anziehen
können: Eine Berührung mit dem Messzahnrad oder andere mechanische Stöße auf
die Sensorfläche können die Sensorelemente beschädigen.
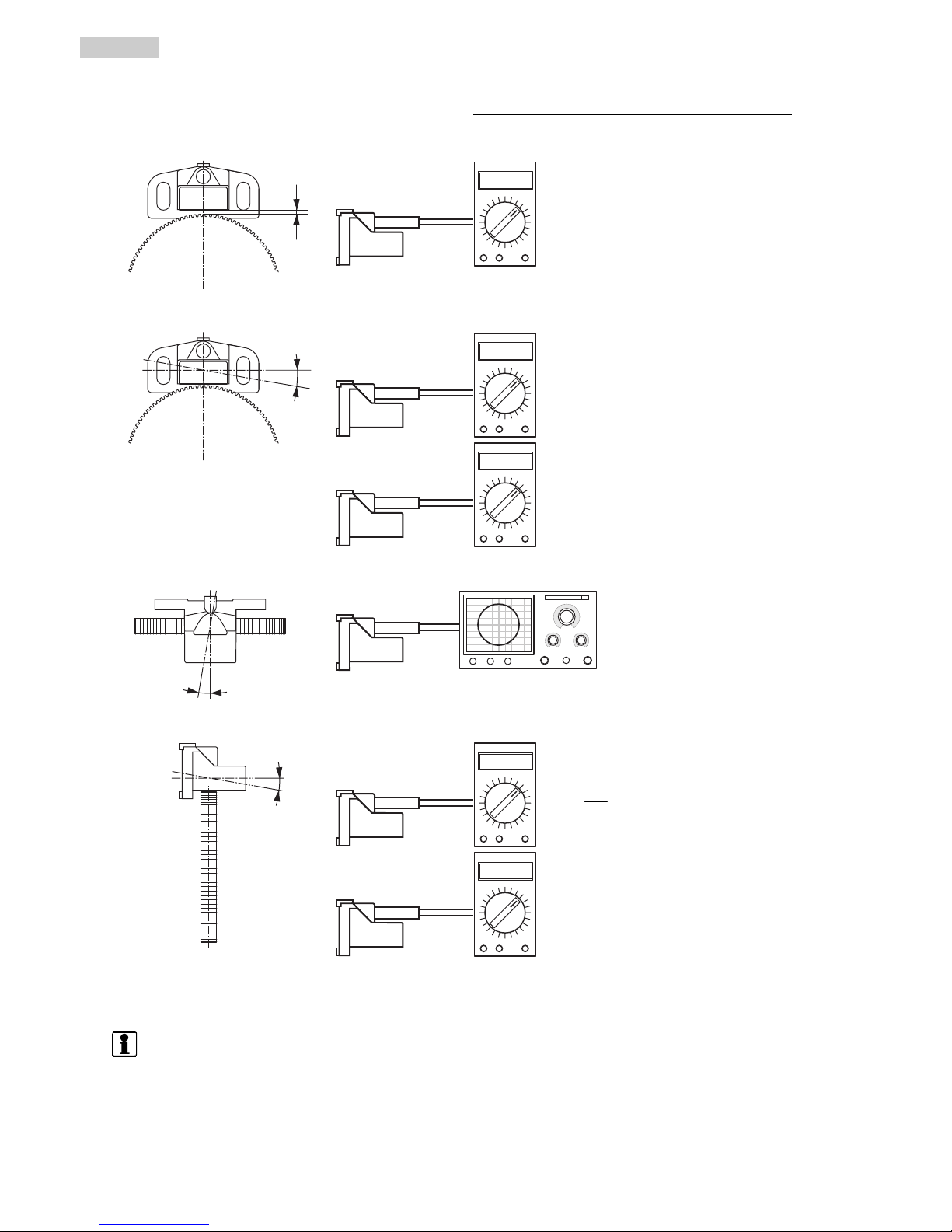
Zur Herstellung eines ordnungsgemäßen Betriebszustands muss der MiniCoder
präzise eingebaut und justiert werden. Deshalb sollen Einbau-, Anschluss- und
Service-Arbeiten nur von qualifiziertem und geschultem Fachpersonal durchgeführt
werden, unter Berücksichtigung der einschlägigen Unfallverhütungs- und Sicherheits-
vorschriften sowie der Angaben in dieser Betriebsanleitung.
Halten Sie die in der Produktdokumentation angegeben Grenzwerte unbedingt ein.
Verwenden Sie den MiniCoder nur bestimmungsgemäß:
Die MiniCoder GEL 244 sind ausschließlich für Messaufgaben im industriellen und
gewerblichen Bereich bestimmt. Mit ihnen können Positionen, Längen, Winkel oder
Drehzahlen gemessen werden.
Sie gelten als Bestandteil einer Anlage und erfordern den Anschluss an eine spezielle
Auswertelektronik wie sie ein Positioniercontroller oder ein elektronischer Zähler
enthält.
Eine andere oder darüber hinausgehende Verwendung gilt als nicht bestimmungs-
gemäß. Für hieraus entstehende Schäden haftet die Firma LENORD, BAUER & CO.
GMBH nicht.
Hinweis in eigener Sache
Die Betriebsanleitung wurde mit größter Sorgfalt erstellt. Es kann jedoch keine Gewähr
bezüglich Fehlerfreiheit übernommen werden.
Die Betriebsanleitung ist bestimmt für den Betreiber bzw. Anlagenbauer sowie dessen
Personal. Bitte bewahren Sie sie sorgfältig auf, so dass sie auch für einen möglichen
späteren Serviceeinsatz am MiniCoder zur Verfügung steht.
2. Beschreibung
2.1 Einsatzbereich
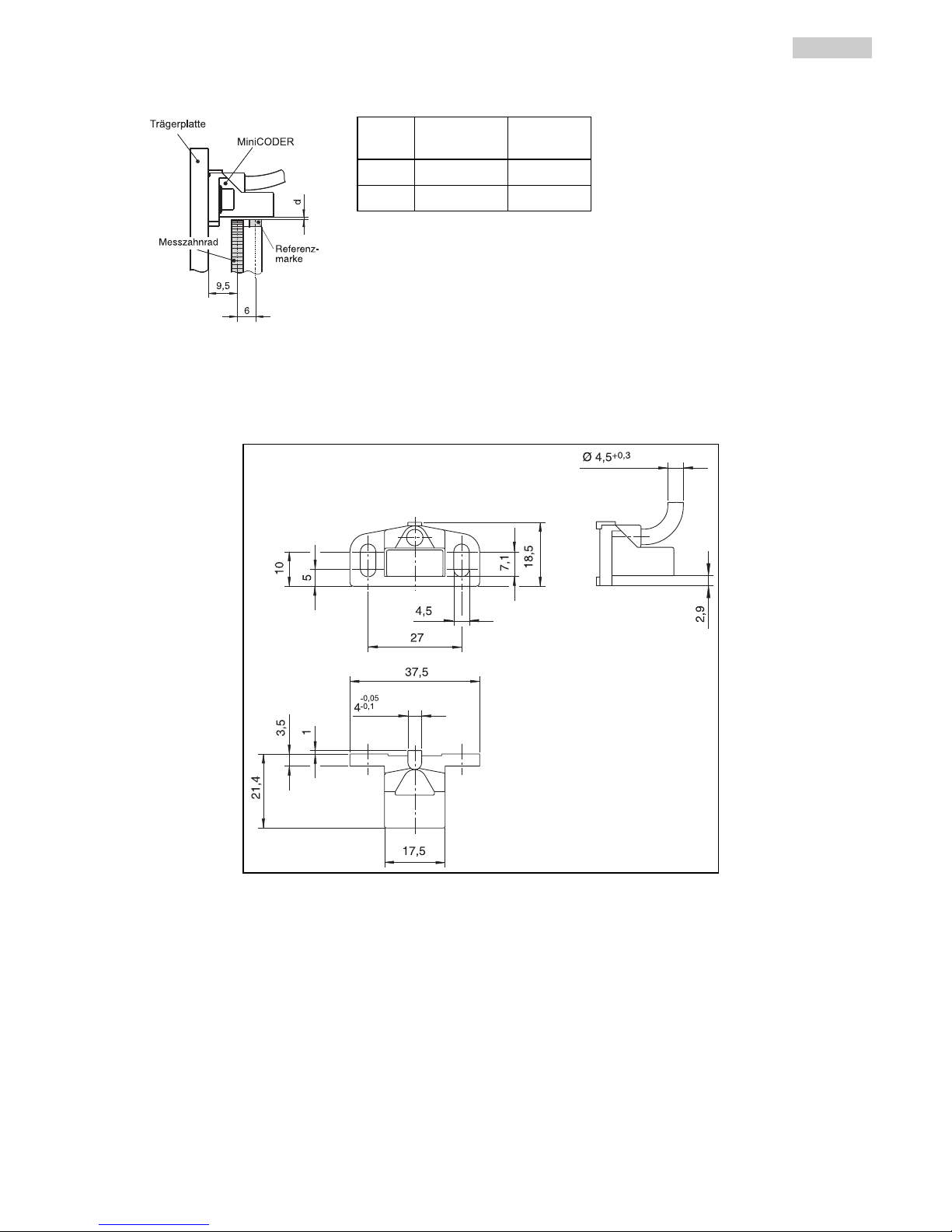
Der Einbaugeber GEL 244 ist eine platzsparende Lösung zur berührungslosen Messung
von vorwiegend Rotationsbewegungen.
Er kann für die Drehzahl- und Positionsmessung an Getrieben, Maschinen, Motoren und
Hochgeschwindigkeitsspindeln eingesetzt werden.
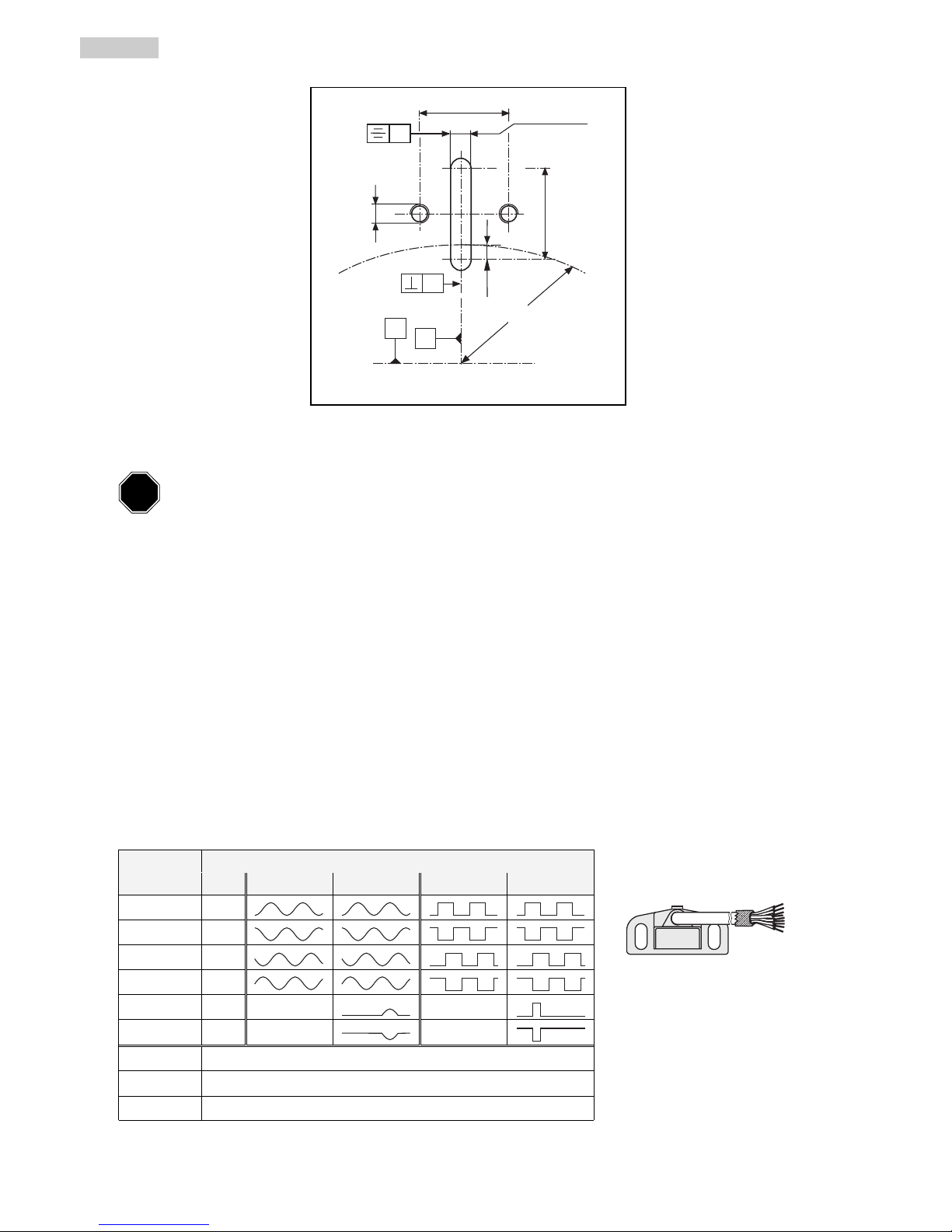
Ausgangssignale sind zwei um 90° phasenversetzte Signale zur Richtungserkennung,
sinus- oder rechteckförmig, wahlweise mit Referenzimpuls. Die Ausgangsfrequenz der
Signale reicht dabei von Stillstand (0 Hz) bis zu maximal 200 kHz.