PUSHCORP, INC.
RPC100-75/125/150 Manual
2.0 General Overview
The PushCorp, Inc. Robotic Paper Changer or RPC100 provides an efficient and
robust method to change abrasive sanding discs for finishing applications with the
use of a robot and Random Orbital Sander. The RPC100 can allow a robot to
change 75mm (3”), 125mm (5”), or 150mm (6”) paper autonomousl through the
application of pneumatic actuators, sensors, and removal blade within the RPC100.
When purchasing, the disc size must be specified: RPC100-75 for 75mm (3”) discs,
RPC100-125 for 125mm (5”) discs and RPC100-150 for 150mm (6”) discs.
The RPC100 is comprised of a blade for removing the paper from a hook and loop
pad, a c linder for appl ing the paper to the pad and sensors to verif that the
process is completed successfull . Worn sanding discs are removed from the hook
and loop backing pad using an adjustable blade mounted to the side of the unit. The
RPC100’s blade can be set to accommodate an grit of abrasive disc b stacking
shim washers based on the thickness and grit. The paper changing process is
validated with the utilization of a probe sensor, which is calibrated to send a 24V
signal indicating that the paper has been successfull removed. This signal can be
used as an indicator in the robot program to proceed to the paper changing process.
A pneumatic c linder provides a repeatable force to consistentl appl new paper to
the backup pad. The design of the RPC100 allows concentric placement on the
ROS so the paper is aligned ever time. This is achieved with guides that center the
disc in relation to the pad. Sensors can be set to send 24V signals when paper is
low and/or completel out.
To operate the RPC100, electrical and pneumatic connections are required. The
electrical connection on the RPC100 is a male “A-code” M12 8pin connector. Power
as well as digital inputs and outputs are all fed through this single connection. The
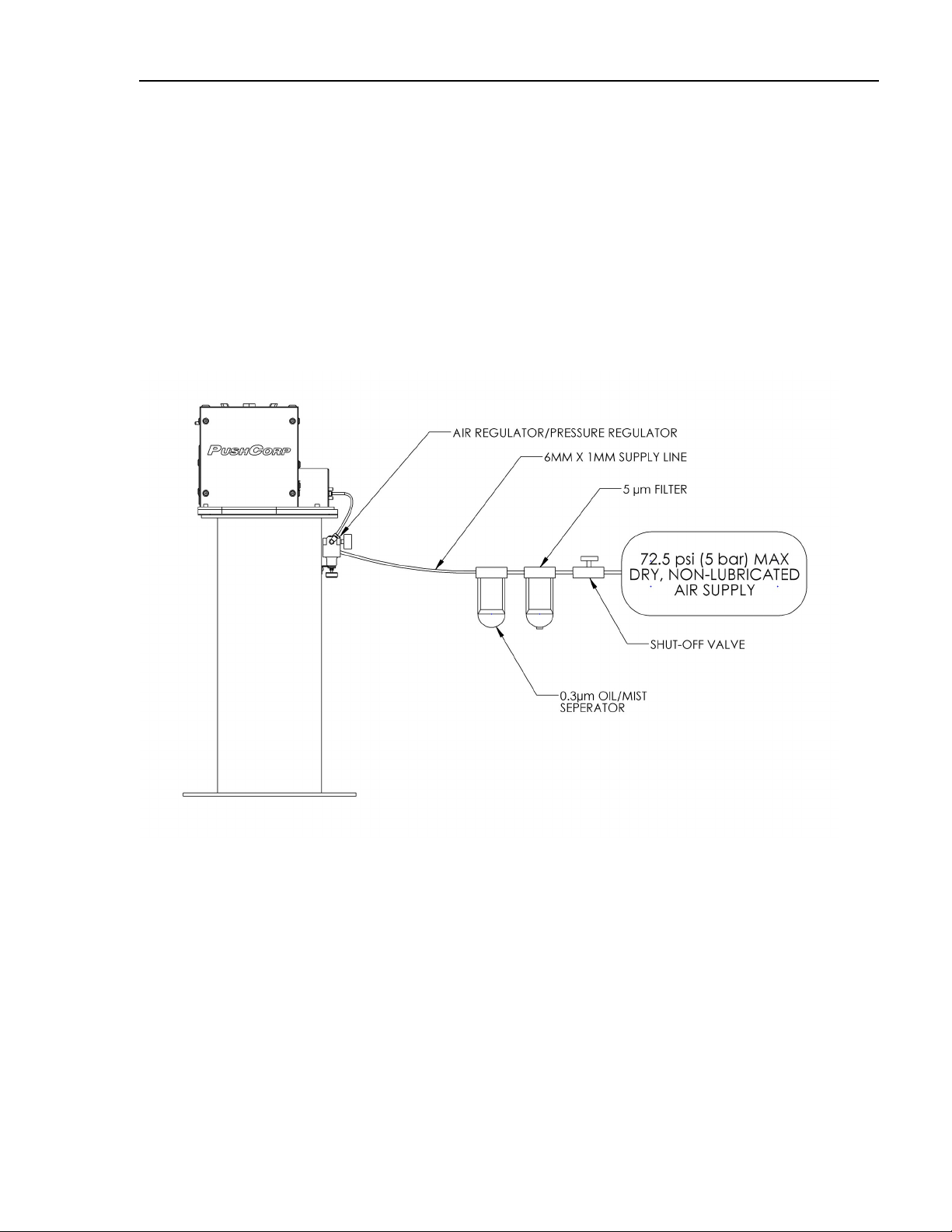
pneumatic connection is a ¼” or 6mm line that connects to a solenoid valve. With a
24V signal the solenoid is actuated causing the c linder to extend. It is imperative
that the air connection is filtered, non-lubricated, and has air pressure ranging from
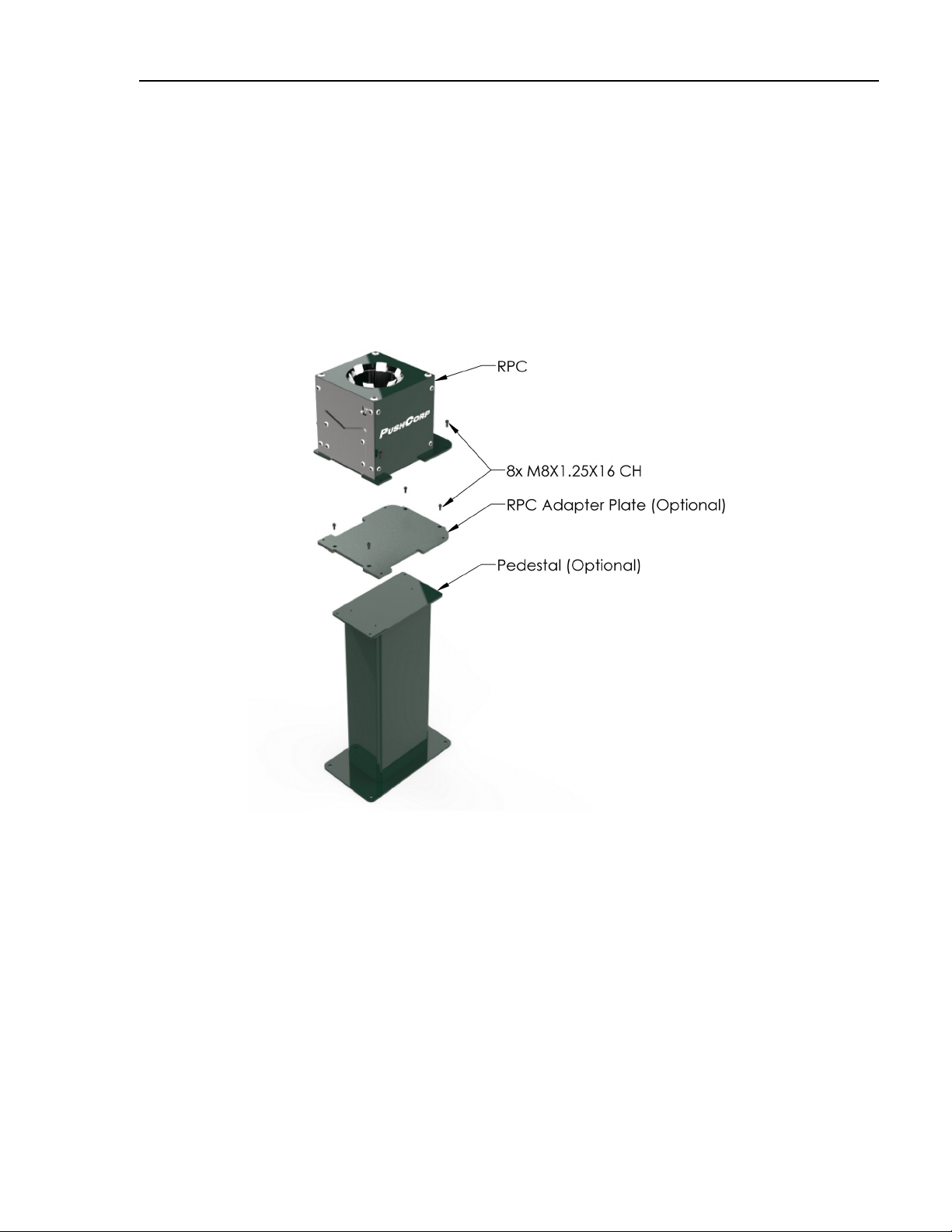
43.5 to 72.5 psi (3 – 5 bar). It is recommended that the RPC100 is securel mounted
to the RPC100 Base with the appropriate bracket both designed and manufactured
b PushCorp, Inc.
4