PUSHCORP, INC.
SBS81 Series Manual 4
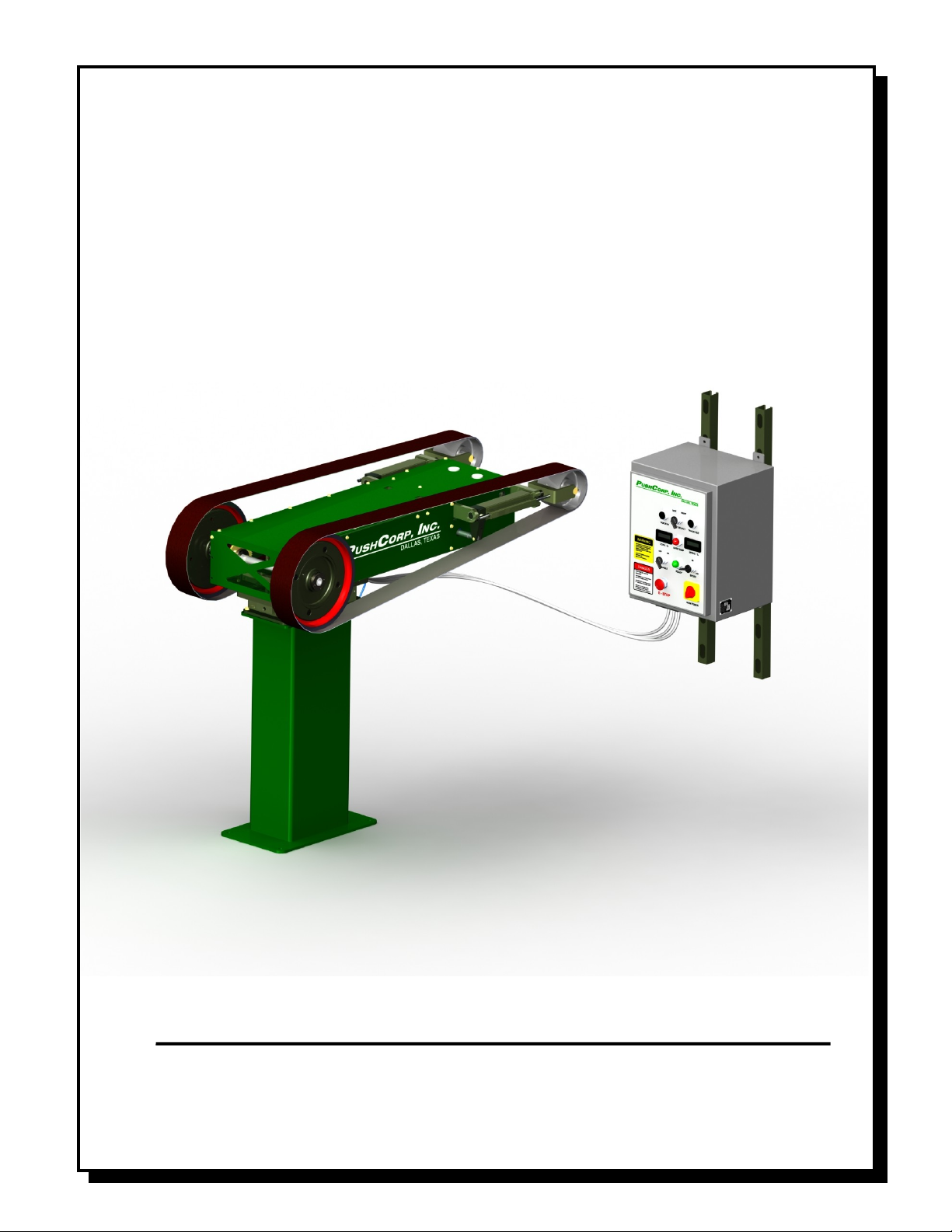
2.0 General Overview
The PushCorp SBS81 Series Servo Belt Stand co bines passive co pliant force
control and closed-loop servo otor speed control technology. The SBS81 has been
designed fro the ground up as a belt stand for robotic finishing with any new and
unique features. Accurate force and speed control allows you to achieve unprecedented
levels of quality and consistency. The SBS81 enables axi u flexibility for any part-
in-hand grinding, sanding, buffing or polishing application. Linear co pliance with 1.6
inches (40 ) of travel and excellent access allow a robot to easily anipulate parts
over the Belt Media. An i portant feature of the SBS81 Belt Stand is the high torque
servo otor and belt drive. The belt drive syste provides a 2:1 increase in torque at
the contact wheels for heavy aterial re oval.
The force control technology in the SBS81 is based on the PushCorp Passive AFD80
Series Force Devices. This technology has proven itself in thousands of hours of
production robotic applications. A basic regulator supplied with SBS81 allows the
SBS81’s force to be varied fro 0 to 50 lbs. (0 to 222 N). This regulator has a coarse
adjust ent and ust be anually set to the desired force output. If the force ust vary
during the finishing process, then an electrically controlled proportional regulator is
required. Very accurate force output requires a precision regulator that operates in a
narrow pressure range.
The SBS81 has a nu ber of notable features that contributes to ease-of-use, and
greater throughput. The Belt Media can be tracked re otely outside the work cell for
convenience and user safety. When the Belt Media needs replacing the operator
anually releases the tension using a lever ounted right on the unit. A belt tension
sensor is provided to notify the user that the Belt Media has not been tensioned. A belt
break sensor is also provided to notify the user if the Belt Media should break. These
sensors can be used by the custo er to progra faults to prevent the syste fro
starting should the Belt Media not be tensioned, or to ove the robot away, and stop the
syste should a belt break. These features protect the user and equip ent, while also
reducing downti e.
In ost any finishing process, consistency is of para ount i portance. For this reason
the SBS81 is powered by a high torque servo otor with adjustable speed control that
can be varied at any ti e during the finishing process. The SBS81 has a 5.7
horsepower (4.28 kW) otor that supplies 14.7 lbft (20 N) of torque and a axi u
speed of 2000 RPM at the contact wheels. This provides a range of Belt Media surface
speeds up to 7330 SFPM (Surface Feet Per Minute). The SBS81 requires 14 inch (356
) dia eter Contact Wheels with a width of 2”, 3”, or 4”. The unit is setup to use
standard 132 inch long Belt Media. For ulti- edia finishing applications, the rubber
contact wheel can be replaced with Scotchbrite, or cloth wheels. This flexibility allows
the SBS81 to perfor a wide variety of finishing applications.
Copyright PushCorp, Inc. 2019. All rights reserved