Contents
USING THE PRODUCT SAFELY.............................................................Ⅰ-Ⅴ
1. INTERFACE OVERVIEW ................................................. 1
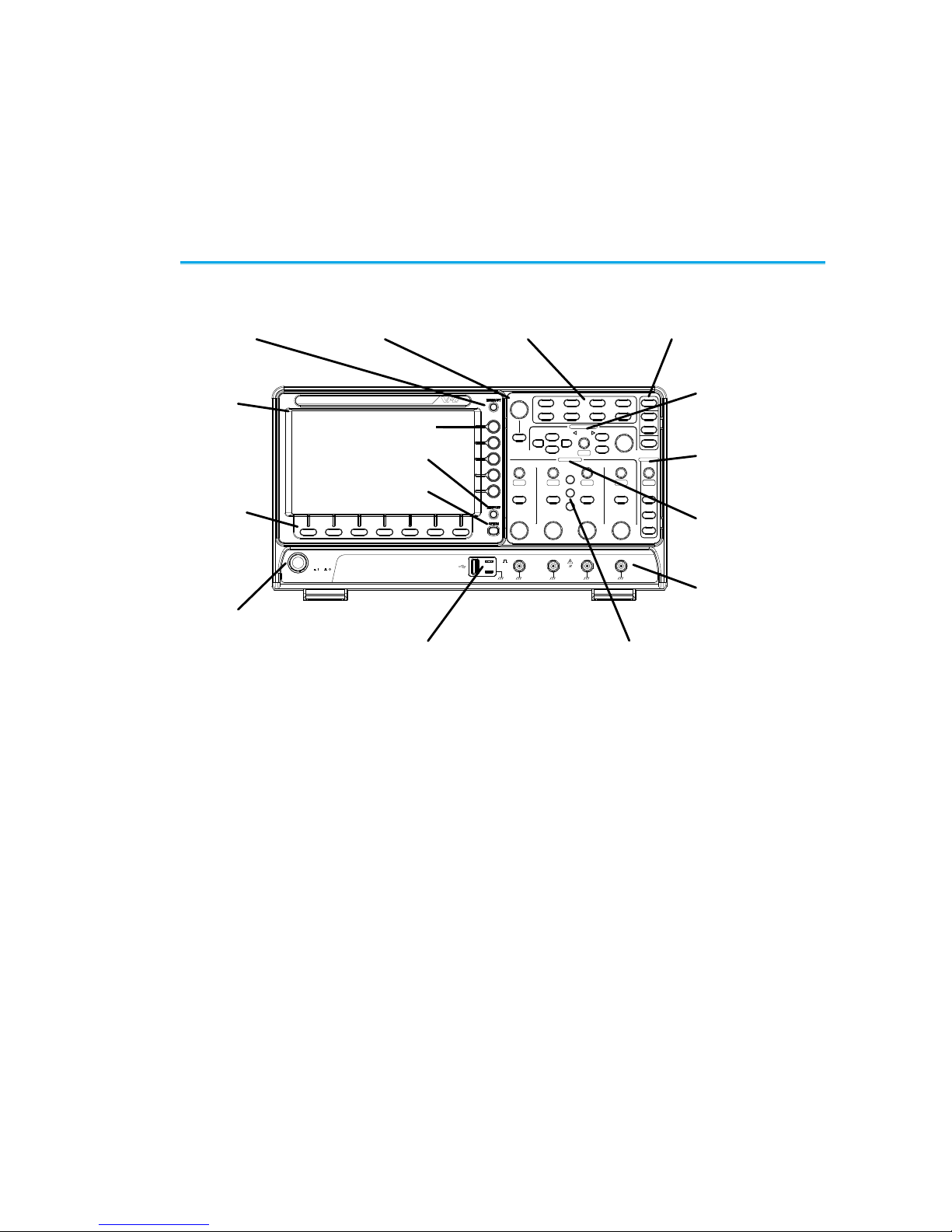
1-1. Front Panel Overview ........................................................ 1
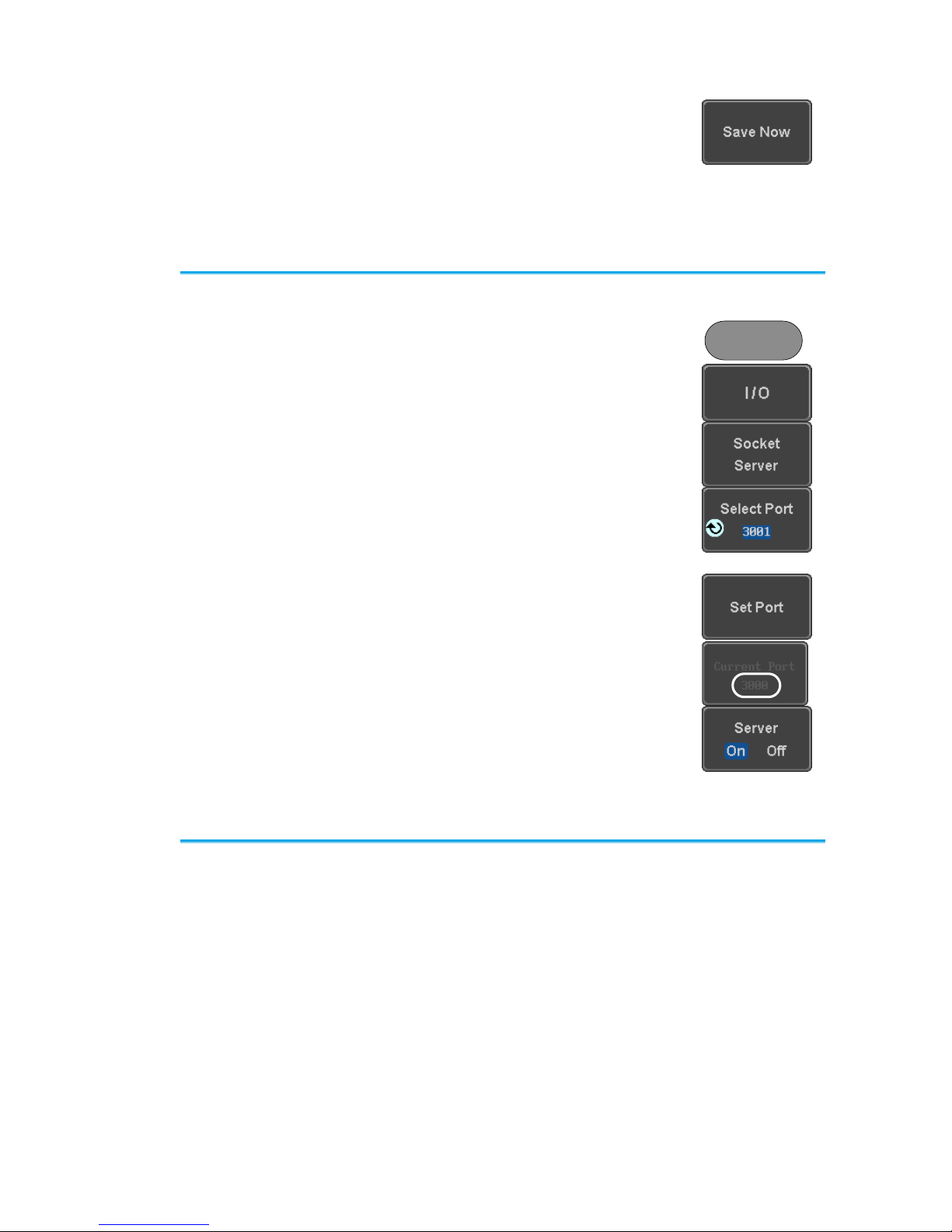
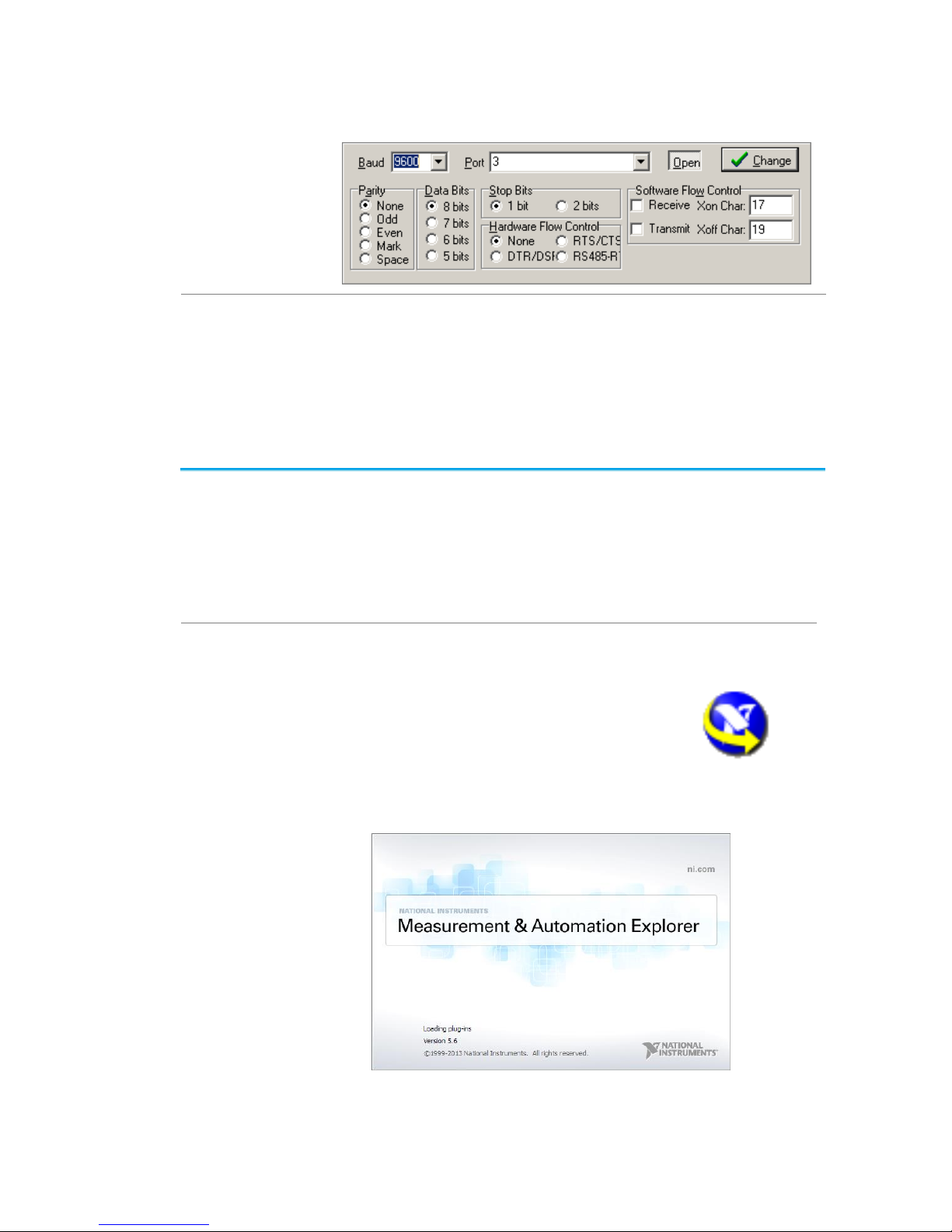
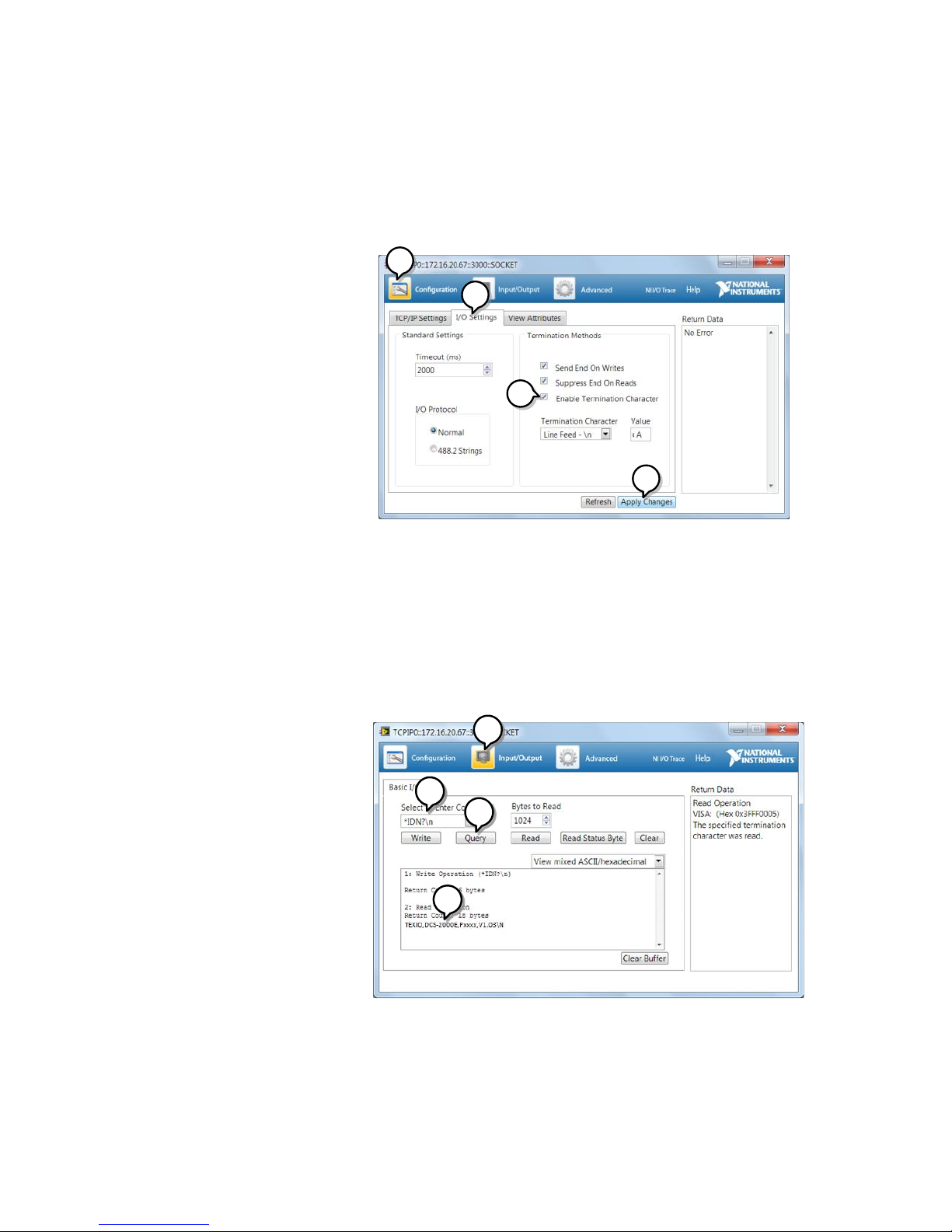
1-2. Interface Configuration ...................................................... 2
2. COMMAND OVERVIEW .................................................. 9
2-1. Command Syntax .............................................................. 9
3. COMMAND DETAILS..................................................... 10
3-1. Common Commands.........................................................11
3-2. Acquisition Commands......................................................16
3-3. Autoscale Commands .......................................................21
3-4. Vertical Commands...........................................................22
3-5. Math Commands...............................................................26
3-6. Cursor Commands ............................................................33
3-7. Display Commands ...........................................................41
3-8. Hardcopy Commands........................................................44
3-9. Measure Commands .........................................................47
3-10. Measurement Commands ................................................68
3-11. Reference Commands.....................................................73
3-12. Run Command................................................................75
3-13. Timebase Commands......................................................76
3-14. Trigger Commands .........................................................78
3-15. System Commands .......................................................109
3-16. Save/Recall Commands ................................................110
3-17. Ethernet Commands .....................................................113
3-18. Time Commands...........................................................113
3-19. Bus Decode Commands ................................................114
3-20. Mark Commands...........................................................126
3-21. Search Commands........................................................127
3-22. Label Commands ..........................................................154
3-23. Segment Commands .....................................................158
3-24. DVM Commands ...........................................................164
3-25. Go_NoGo Commands ...................................................166
3-26. Data Logging Commands ..............................................171
3-27. Remote DiskCommands ................................................173
4. APPENDX ....................................................................175
4-1. Error messages ..............................................................175