Contents
Hans Turck GmbH & Co. KG | T +49 208 4952-0 |
[email protected] | www.turck.com
V03.00 | 2022/12 | 2Contents
1 About these instructions ...................................................................................................................3
1.1 Target groups ...................................................................................................................3
1.2 Explanation of symbols used.........................................................................................3
1.3 Other documents.............................................................................................................3
1.4 Feedback about these instructions ..............................................................................3
2 Notes on the product .........................................................................................................................4
2.1 Product identification .....................................................................................................4
2.2 Scope of delivery..............................................................................................................4
2.3 Turck service .....................................................................................................................4
3 For your safety.....................................................................................................................................5
3.1 Intended use .....................................................................................................................5
3.2 Obvious misuse ................................................................................................................5
3.3 General safety notes........................................................................................................5
4 Product description ............................................................................................................................6
4.1 Device overview...............................................................................................................6
4.1.1 Display elements ..............................................................................................................................6
4.2 Operating principle .........................................................................................................6
4.3 Functions and operating modes...................................................................................6
4.3.1 IO-Link mode......................................................................................................................................7
4.4 Technical accessories ......................................................................................................7
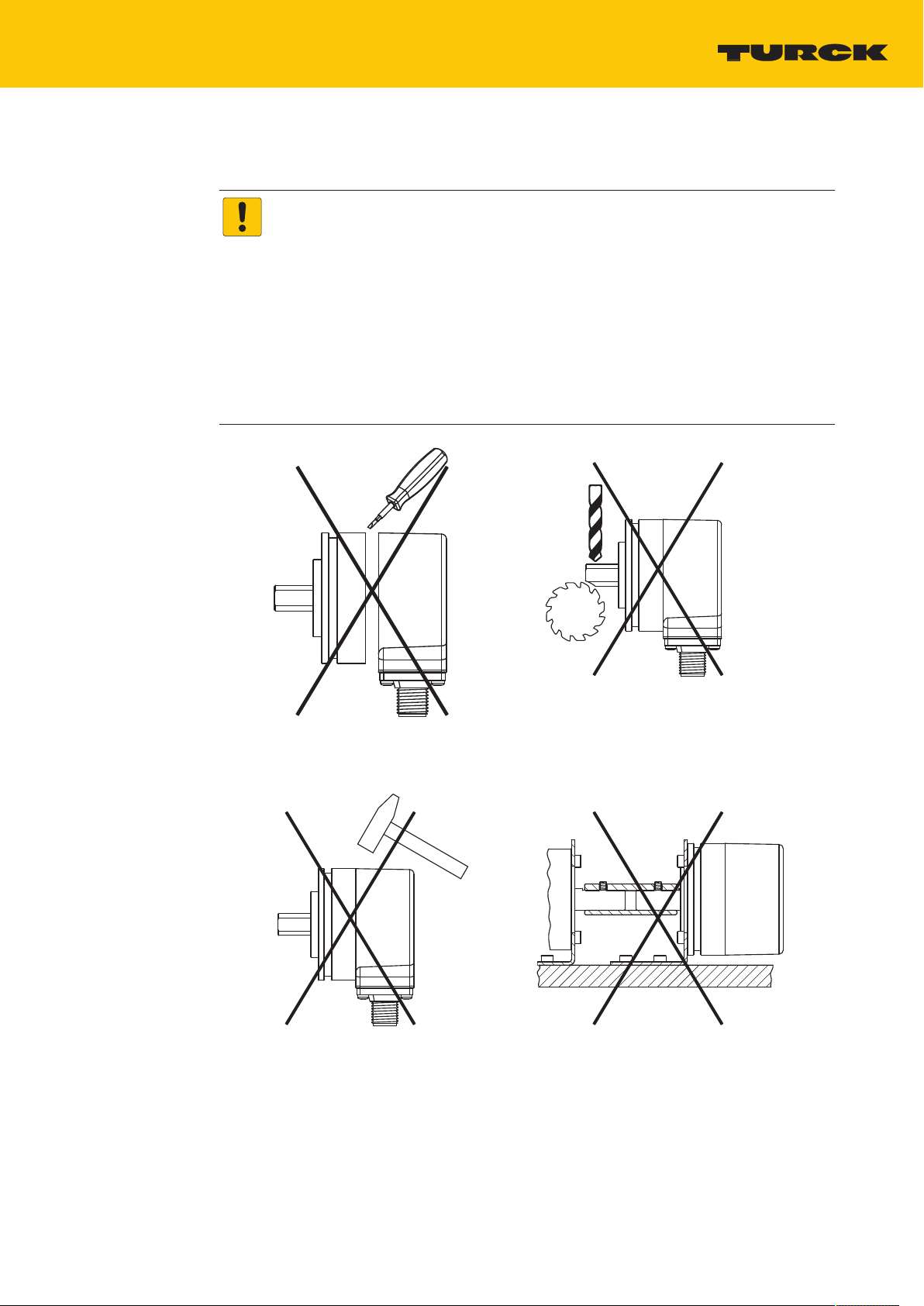
5 Installing ...............................................................................................................................................8
5.1 Mounting the solid shaft encoder using a coupling .................................................9
5.2 Mounting the hollow shaft encoder using a coupling .......................................... 10
6 Connection ........................................................................................................................................ 11
6.1 Wiring diagram.............................................................................................................. 11
7 Commissioning................................................................................................................................. 12
8 Operation........................................................................................................................................... 13
8.1 LED display..................................................................................................................... 13
9 Setting................................................................................................................................................ 14
9.1 Setting via IO-Link ........................................................................................................ 14
9.1.1 IO-Link parameters ....................................................................................................................... 14
9.2 Setting via FDT/IODD ................................................................................................... 17
10 Troubleshooting............................................................................................................................... 18
11 Maintenance ..................................................................................................................................... 19
12 Repair ................................................................................................................................................. 19
12.1 Returning devices ......................................................................................................... 19
13 Disposal.............................................................................................................................................. 19
14 Turck subsidiaries — contact information.................................................................................. 20