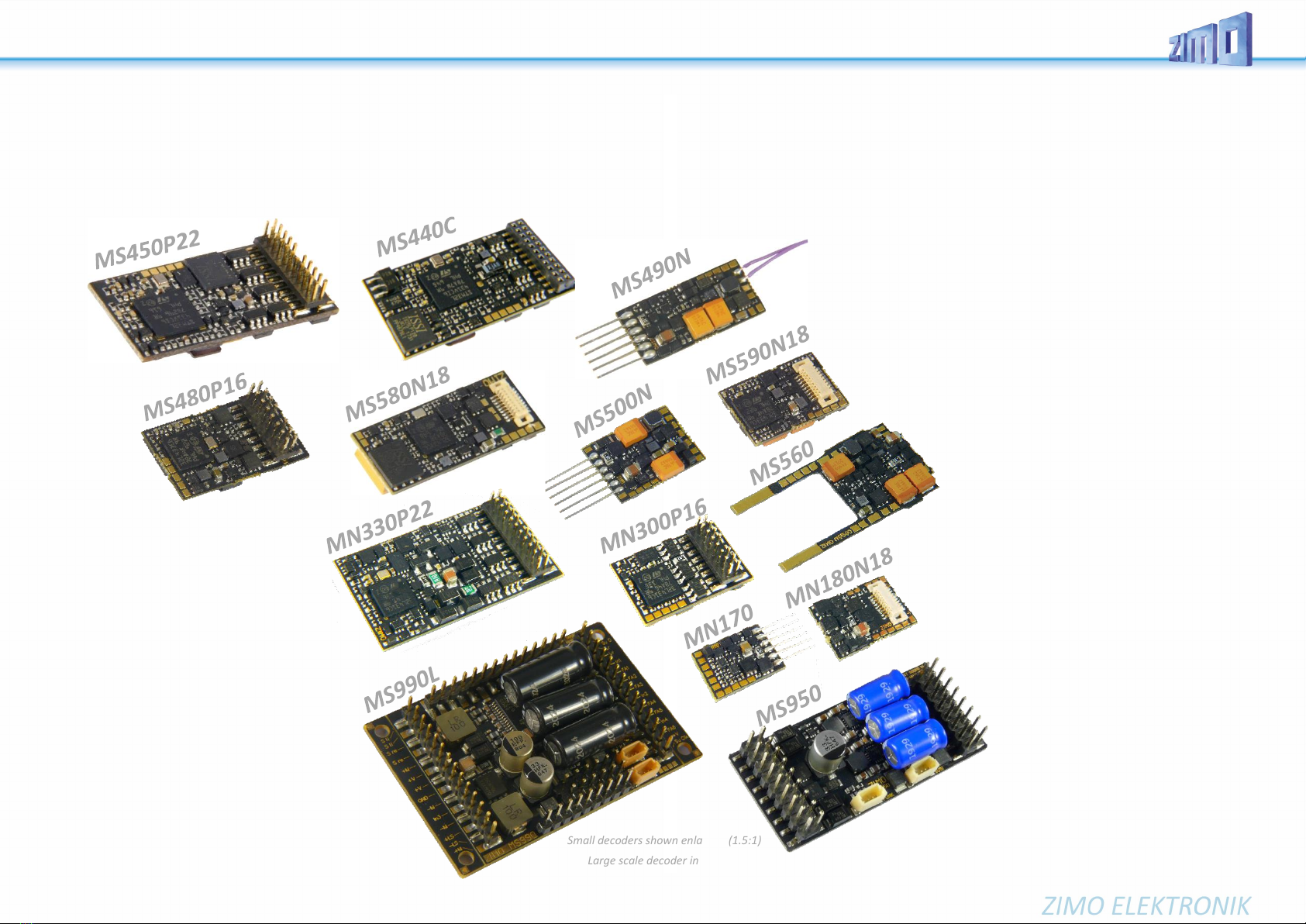
Page 2 MS - SOUND decoders MS440 to MS990 and MN - NON-SOUND decoders MN170 to MN340
Contents
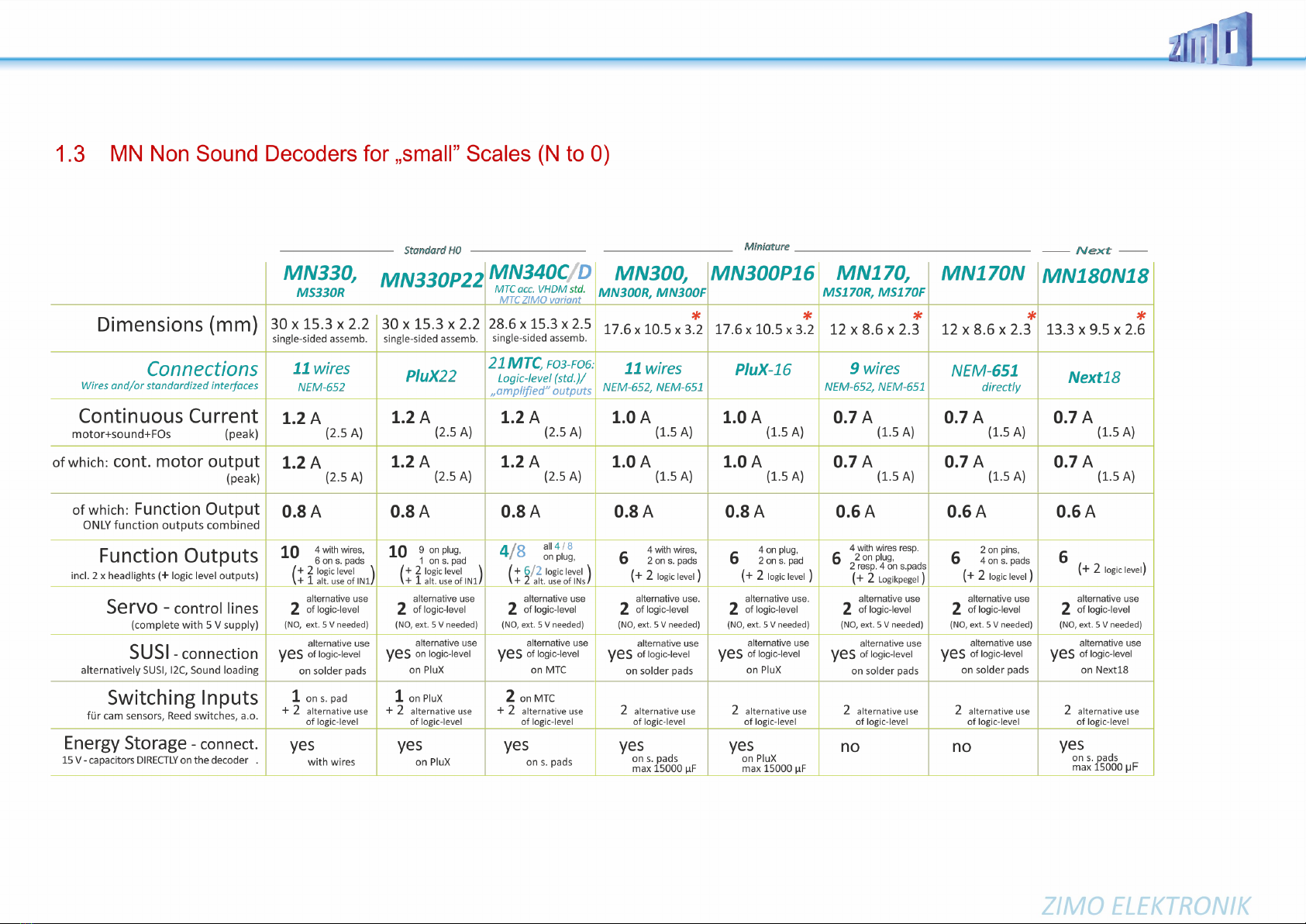
1Overview of the types and type-dependent data.................................................................. 4
2Technical Data, schematics, operation with mfx.................................................................. 7
3
2B
CVs in DCC operation....................................................................................................... 22
4
3B
RailCom - “Bidirectional communication” for DCC ............................................................. 44
5
4B
ZIMO SOUND –Selection and Programming.................................................................... 46
6Sound equalizing (filter) of the MS sound decoders........................................................... 60
7Installation and connection of the ZIMO decoder............................................................... 62
8CV - Overview; CVs in numerical order............................................................................. 64
9Scripts for decoders, short description............................................................................... 82
10 Software update and sound loading with MXULFA............................................................ 83
11 Service Notes.................................................................................................................... 86
“mfx” is a registered trademark of Fa. Gebr. Märklin & Cie GmbH.
“RailCom” is a registered trademark of Lenz GmbH.
CHANGE PROTOCOL of this instruction manual
2019 09 11: Cover: MS440C
Page 3 - various changes
Page 34 - additional sound classes
Page 37 and following - added Diesel, Electro, random, …
Page 34 and following - various changes and additional entries to the CV tables
2019 12 09: Page 5 –MS950 added in decoder table; corrections (dimensions MS480, MS490, MS580, stay-alive capacitor cir-
cuitry), naming of MS580
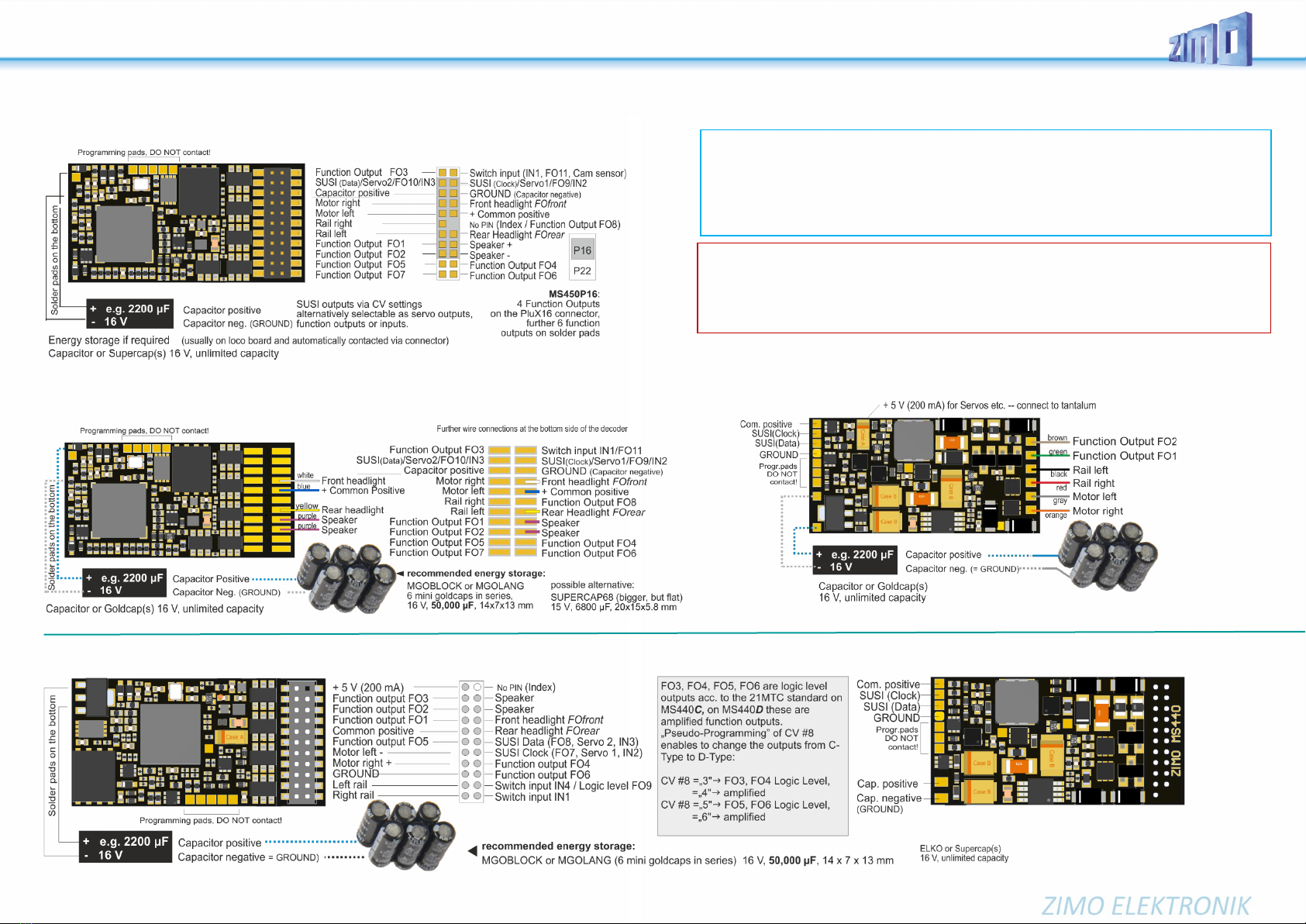
Page 7 - Connection schematics for MS440C/D
Page 25 - Changes to CV #190/191
2020 01 23: MS480, MS490, MS580 schematics added, MS450, MX450 schematics modified
2020 02 07 Page 35: Correction driving sound, table of volume settings
2020 03 25 Drawings and text stay-alive capacitor of MS580
2020 06 29 Corrections accordingly and summarising the German-language editions
Connection diagrams and types overview updated
2021 02 03 Corrections accordingly and summarising the German-language editions
2021 04 23 Addition of "StayAlive" to connection diagrams, various CV #153,…
Additions to the type table, separation into "small" types and large scale decoders
2021 04 29 Addition of cover images
2021 05 12 Improvements of the schematics, new pages for MS990L, -K
2021 05 21 Chapter 7: Software Update and Sound Load with MXULFA
Chapter 3.26: New CV #264 low voltage for large scale and special decoders
Chapter 3.25: Addition for servo control lines 5-8
Chapter 5: CV additions according to the above points
2021 06 14 NEW: Chapter 3.12 "Distance-controlled stopping - constant braking distance".
Chapter 3.11: New, reference to CV #29, Chapter 3.1: Description for CV #27 new
2021 06 29 Chapter 3.24 modified, Alternative application of SUSI pins; Various corrections
2022 05 05 Cover: MS560
2022 08 01 MS480, MS490, MS500, MS590: Rev. B. Details of stabilised low-voltage sources added to diagrams and tables. Chapter 2: Warning
for PIKO boards
2022 11 10 Chapter 6: Installation notes for older locomotives
several CVs changed or added (CV #10, #195-#199, #134, ...),
Chapter numbers in CV list (chapter 8) are now clickable
2022 12 05 Correction of the connection diagrams of MS950 and MX605FL (see MS560)
2022 12 15 various corrections and additions (CV #203 / #204, missing links,…)
2023 02 01 added CV #250 for MN decoders, CV #27 –Bit 2 removed, Added Information for CV #49, #50. #56
2023 04 27 several small corrections
2023 07 11 Addition of MN Decoders, new Chapter Sound euqalizing, several small changes and updates
2023 07 11
SUMMARY of features not yet implemented in SW version 4.229 (preview to 5.00)
oMotor brake (for non-worm gear): CV #151 (only if not in consist, otherwise it is used differently)
oAdaptive acceleration and special possibilities for acceleration: CVs #123, #394, #246, #348 *
oChange between individual and consist address via key, CV #197; reduction control, CV #151
oSpecial operating state “km/h regulation”: CVs #135, #136 *)
oThe “CV #300 procedure” and test drive for basic load: CVs #300 - #302
oSound classes rolling sounds, second thyristor, panto sounds: CVs #588, #593, #594, #596, #598
oSpecial measures (interruption Acceleration) for diesel-mechanical locomotives: #364, #365
oLarge scale decoder: 2nd smoke generator; with 4.205 already cylinder drainage and start 2nd diesel engine
o"Stereo" (large scale decoder, 2 sound output channels, settings in CV page 31/32 = 145/0);
oTilt and curvature sensor launch for display on controller and sound influence.
oControl influence CV #58, load dependence steam/diesel: CVs #277-#279, #280, #154, #158, #378-#379
------------------------------------
*) the marked block of features will be updated in regards to the MX generation, because, on the one hand the
performance will be enhanced, and on the other hand, it will present advances for future operation types (first
planned new feature in this regard: display of target distance on the controller).