OVERLOAD PROTECTION:
As is the case with all ZIMO decoders, the outputs of the MX82 are protected
againstexcessivecurrentdraw andshortcircuits.Anyoutputisturned offifanover
-
load situation exists. After that, the decoder keeps testing the affected output,
which often results in flashing lights.
Eventhough thedecoder iswellprotected, do notassume thatitisindestructible.Pleasepayat-
tention to the following:
Faultydecoder connection;connecting themotorleadsto trackpowerfor instance oranoverlooked
connectionbetweenthemotor brushesandrail pick-up’scausesshortsthatare notalwaysrecognized
by theoverloadprotectioncircuitandcouldleadtomotor endstage damageoreven totaldestruction of
the decoder.
Unfit ordefectivemotors; a shortedwindingor commutatoris notalwaysrecognized by the high cur-
rentconsumption it causes, because these are often just short spikes. They can lead to decoder
damage, including damage to end stages due to long time exposure.
Voltagespikes whichcanbeinduced frommotorsandotherloadsconnected toadecodermaybe
responsible formore decoder damage thanexcessive current draw. Theheight of suchvoltagespikes
depends on the trackvoltage selected and can reach several hundred volts. They will be removedby
specialovervoltageprotection circuits butthecapacityandspeed ofsuchelementsislimited. Don’tse-
lecta higher trackvoltagethan whatisrecommendedfor therolling stockused on the layout. The full
range (up to 24V), adjustable with a Zimocommandstation, should only be utilized in special cases.
Even though Zimodecoderscan be operated at 24 Volts (MX62 at 20V), thatis not thecase if used in
conjunctionwith some other function elements built into a locomotive.
THERMAL PROTECTION:
Alldecoderscoveredinthismanualhave theability tomeasure theirownoperating
temperature. Power to the motor will be turned off once the temperature of the
decoderexceeds 100oC. The headlights start flashing rapidly, atabout 10 Hz, so
that theoperator can recognize this state. Motor control willresumeautomatically
after a drop in temperature of about 20oC, typically in 30 to 60 seconds.
3. Addresses and Programming
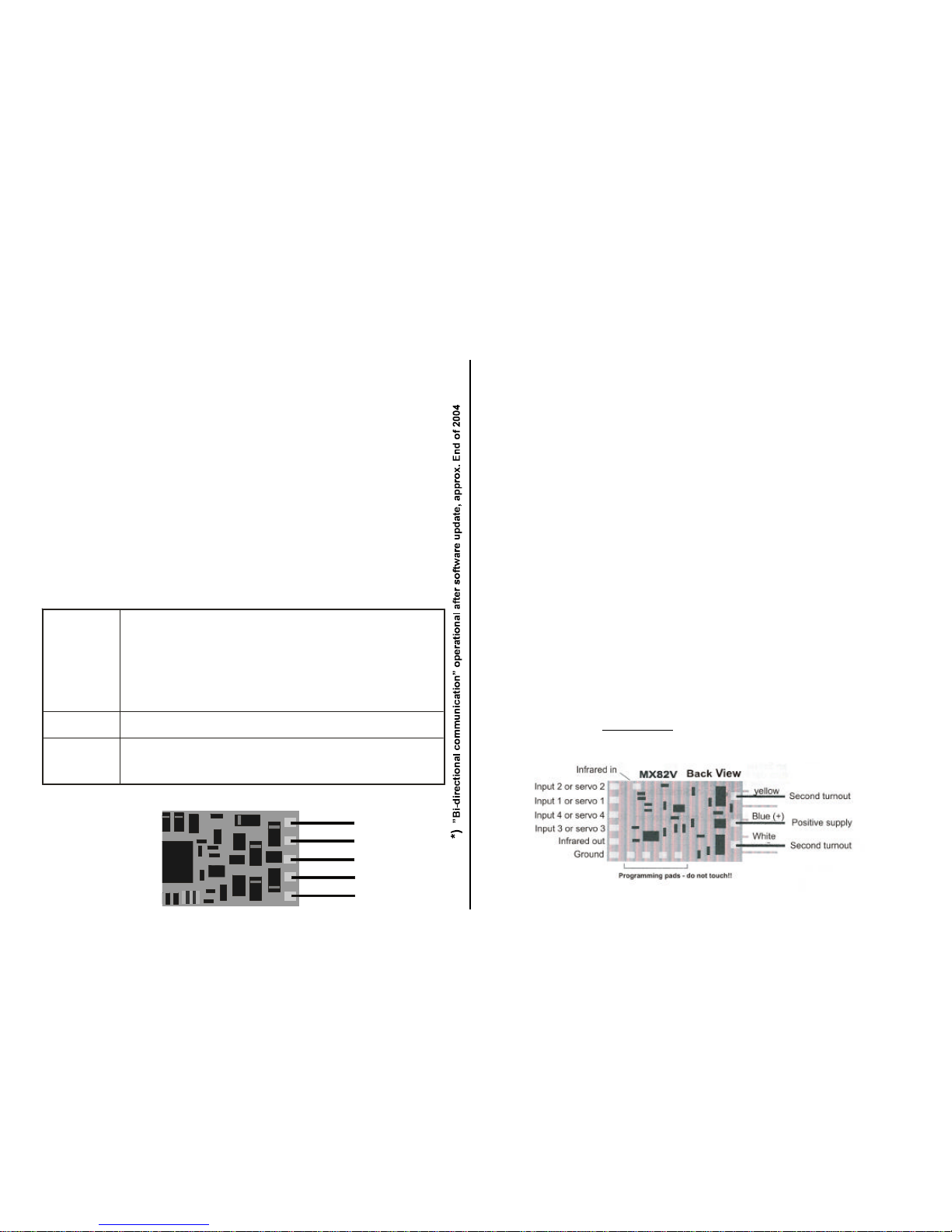
Incontrastto locodecoders,accessorydecoders require not only anaddress but
also asubaddress (2 sub addresses for theMX82V).The address is required for
decoder access with a cab, and the sub address determines with which function
key the turnout will be operated..
Althoughthe MX82maybeinstalled immediately, anaddresshas tobe assignedbefore itiscon-
nected to the layout wiring!
Assigning a new address is not possiblewithseveral MX82 connected in parallel to the track or
power bus; if tried, all MX82 would receive the same address.
PROGRAMMING PROCEDURES:
Detailed procedures (service mode and operational mode) for program-
mingandreadingofaddressesandconfigurationvariablesarefoundinthe
instruction manual for the cab (e.g. MX21).
Programming is even simpler and more convenient with the help of a computer and ADaPT
software (E.Sperrer, software developer)!
Technical note to acknowledgment/read-out during “service mode” programming:
Whenprogrammingadecoderwithacaborcomputer,everysuccessfulprogrammingstepwillbemade
visiblebythedecoder.Thesameacknowledgmentmethodisusedwhenreadingtheconfigurationvari-
ables.
The decoder acknowledgment is carried out by briefly turning the motor and headlights on, causing
shortpowerpulsesthatthecommandstationrecognizes.Acknowledgmentandread-out ofadecoderis
onlysuccessful ifthecurrentconsumption is high enough, which means that the motor and headlights
have to be connected or at least one of the two.
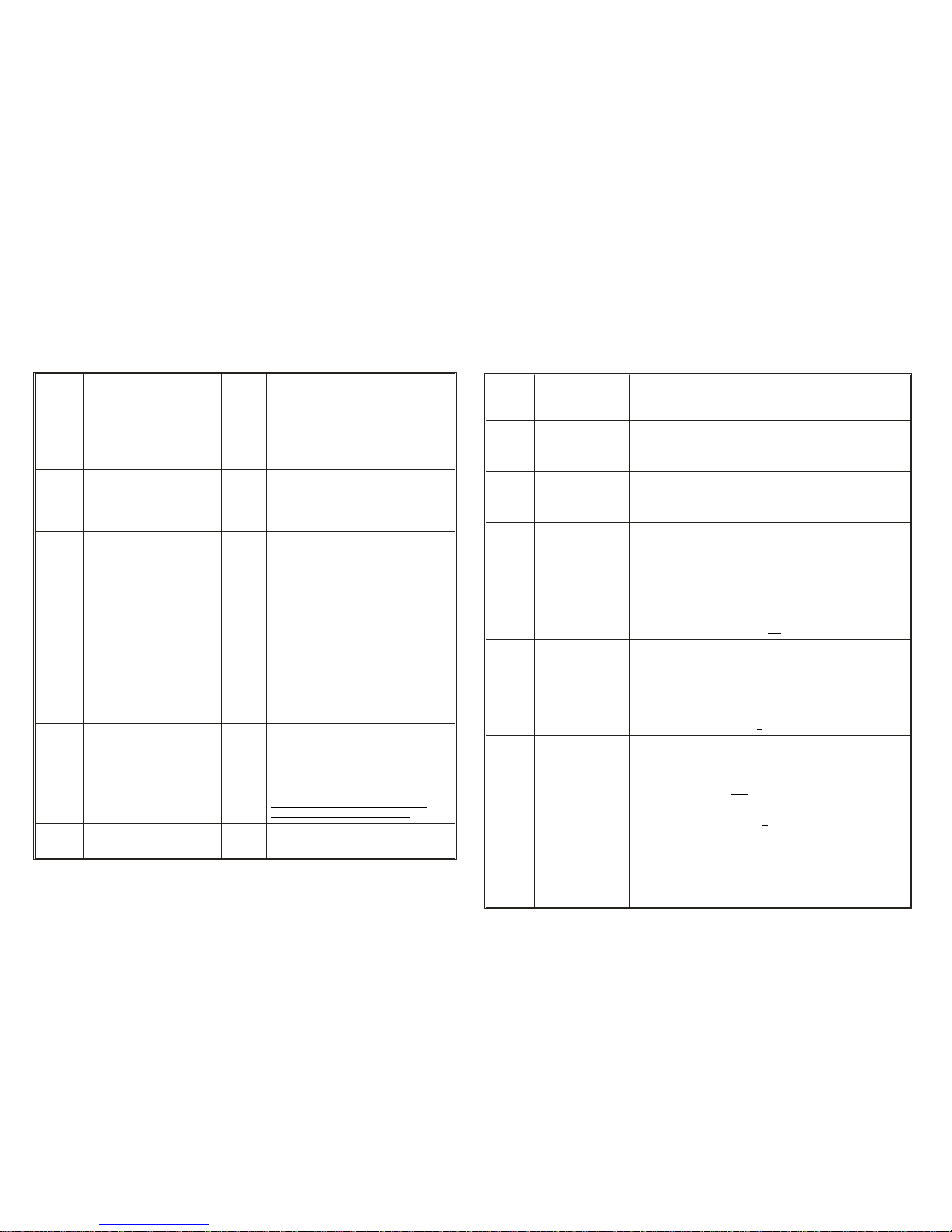
The meaning of Configuration Variables (CV’s) are in part standardized by the
NMRA DCC RECOMMENDED PRACTICES, RP-9.2.2. There are however
certainCV’sthatareforZimo decoders only, insomecasesexclusivelyfor specific
types.
Always use the specifications for the decoder in question, since the value range
may differbetween manufacturers, even with standardizedCV’s; inthiscase use
the table below.
ACCESSORY DECODER MX82 Page 3
Programming in
“Service mode” ”Operations mode”
Decoder or turnout with decoder on Decoder connected to main track.
programming track (socket: ”PROG”).
Addresses and CV programming. Programming of configuration variables only.
Secure programming with Programming without acknowledgement (commands
are sent repeatedly, which increases reliability)
Read-out of configuration variables and Read-out of configuration variables is not possible.
address is possible. (Later possible with “bi-directional communication”).
Start procedure with “E” and “MAN” keys. Start procedure with “E” and “F” or “E” und “W”.
(”on-the-main”, MX1 -socket ”SCHIENE”),
acknowledgement.